Toolchain Long-Term Support for Flight Controller Introduction ¶
1. ZY_Racer¶
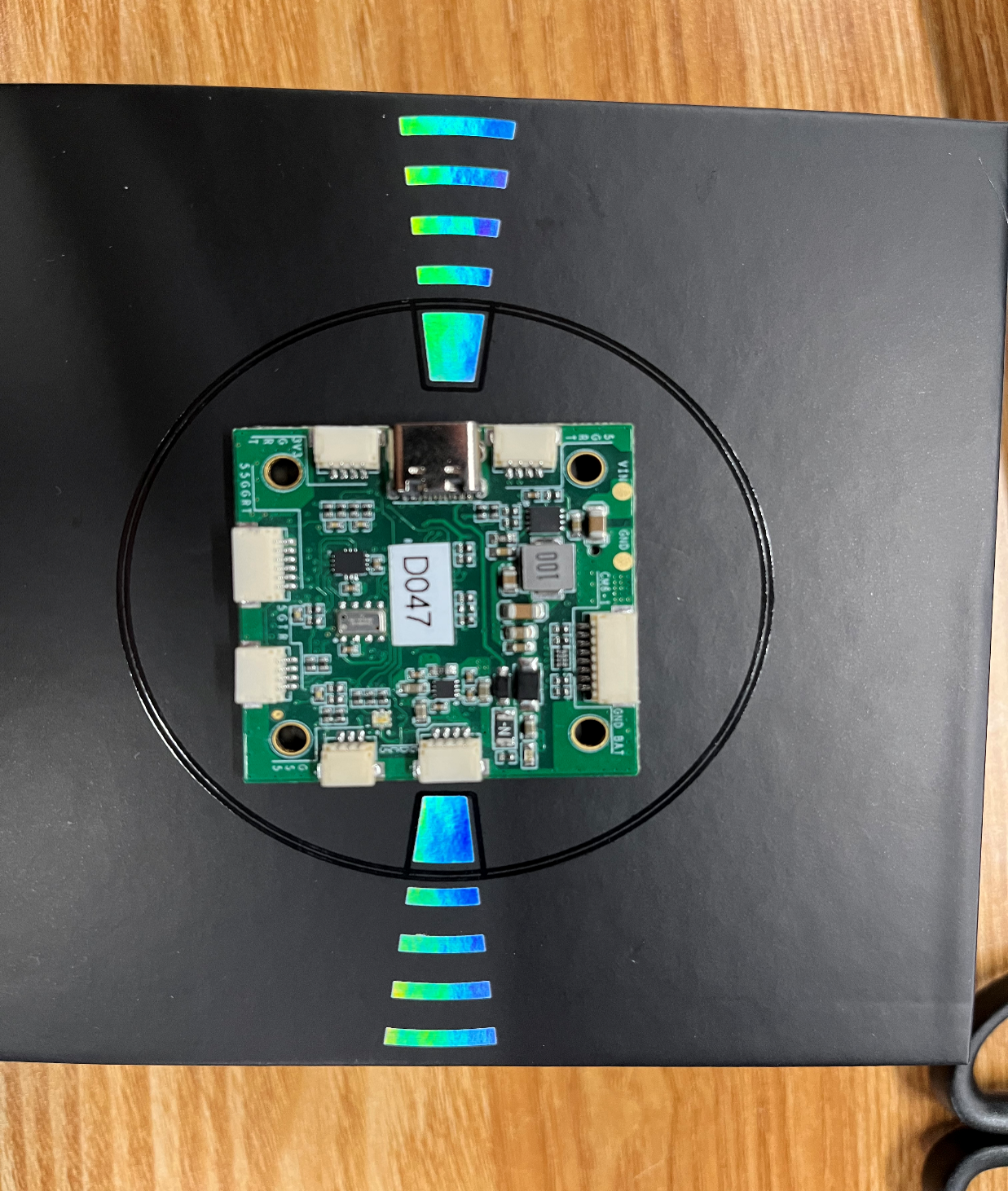
The Racer flight controller is a drone flight controller developed by Beijing Zhuoying Intelligent Technology Co., Ltd., based on the PX4 open-source flight control architecture. It features high reliability, strong performance, and stable operation.
It integrates a 3-axis gyroscope, 3-axis accelerometer, barometer, and other sensors, supports SD card flight data logging, and provides open-source code for secondary development. It supports multiple unmanned platforms, including quadcopters, fixed-wing aircraft, VTOL drones, ground vehicles, and unmanned boats.
An integrated power module allows direct battery power supply, reducing wiring and significantly improving flight reliability.
2. RflySim Configuration¶
If using the Zhuoying Racer flight controller hardware (corresponding firmware: droneyee_zyfc-h7_default), it is recommended to use the software installation and configuration shown in the figure below.
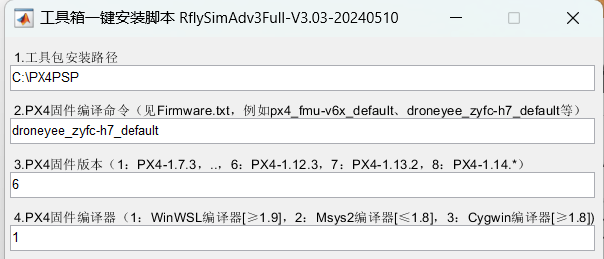
- Use the
droneyee_zyfc-h7_defaultcompilation command - Select “6”: PX4 1.12.3 firmware version
- Select “1”: WinWSL compiler
3. Restore Official Firmware¶
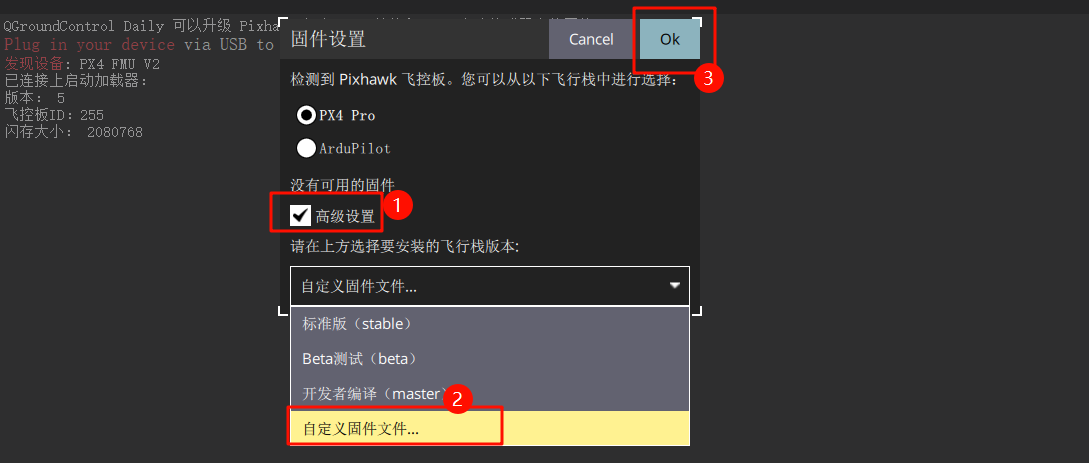
Open QGroundControl (QGC) and navigate to the following interface.
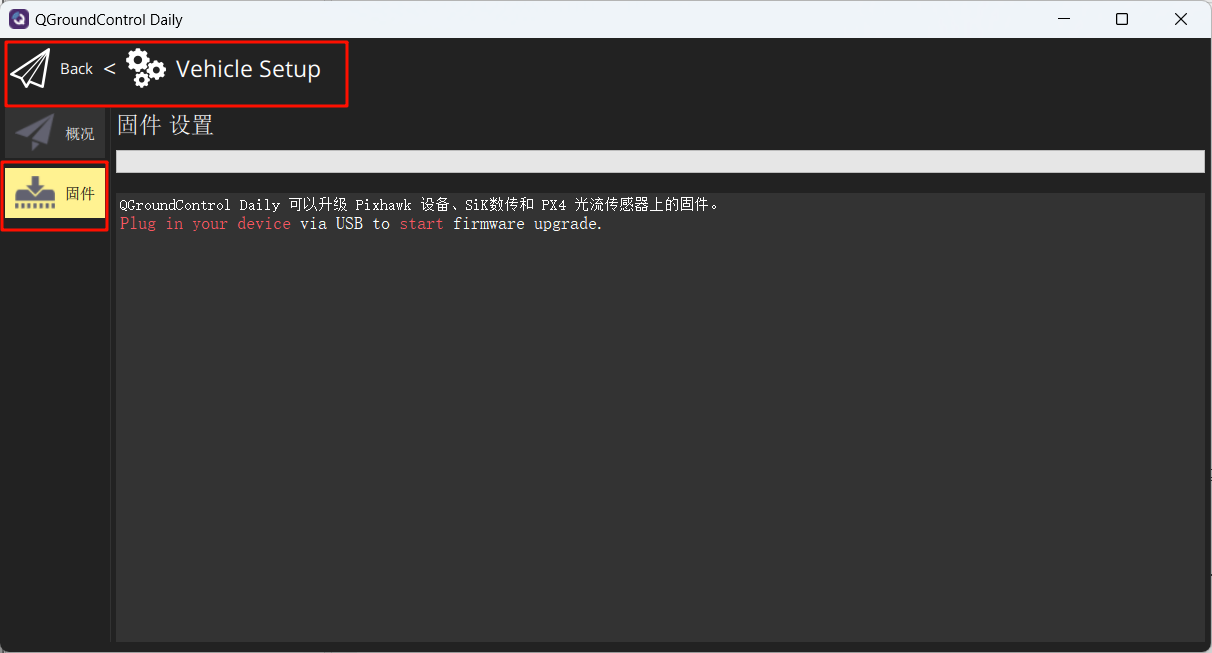
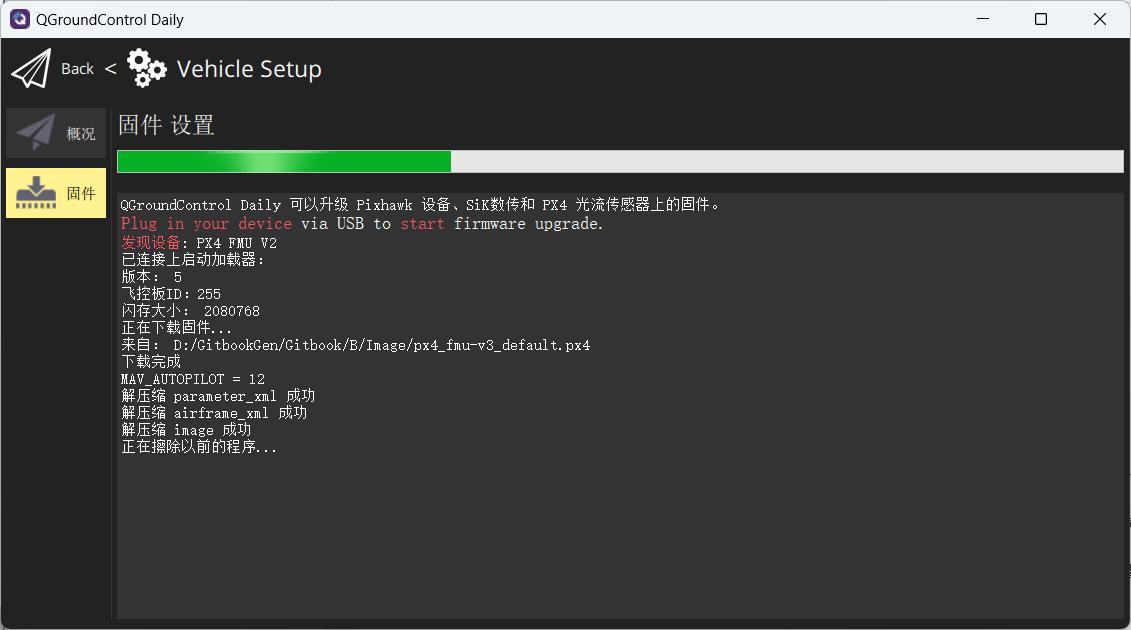
Connect the flight controller to the computer, and in the pop-up interface, select the following option to flash the firmware: droneyee_zyfc-h7_default.px4
Wait for the firmware flashing to complete.
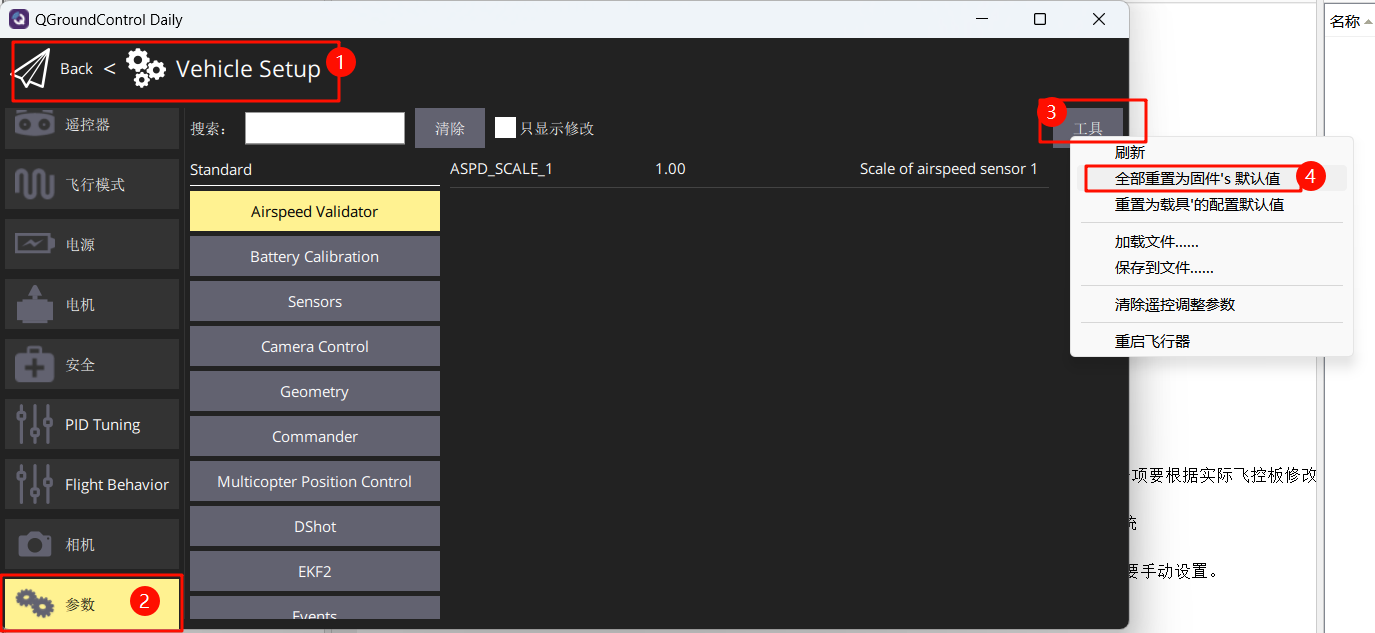
Reset the flight controller parameters to the firmware’s default values.
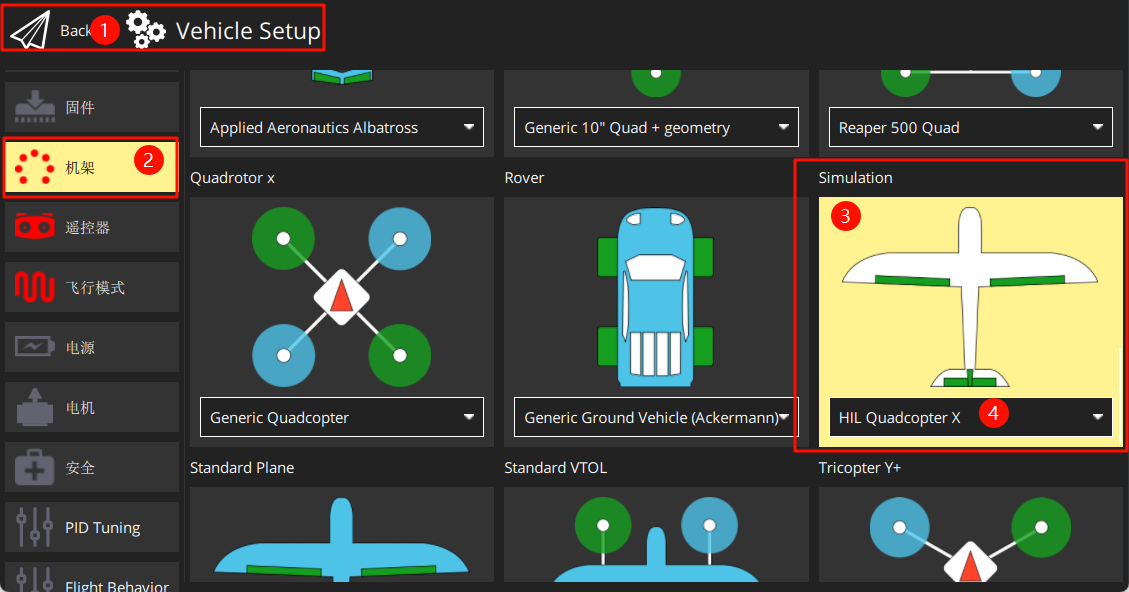
Set the airframe to “HIL Quadcopter X”, scroll to the top, and click “Apply and Restart”. Wait for the restart to complete.

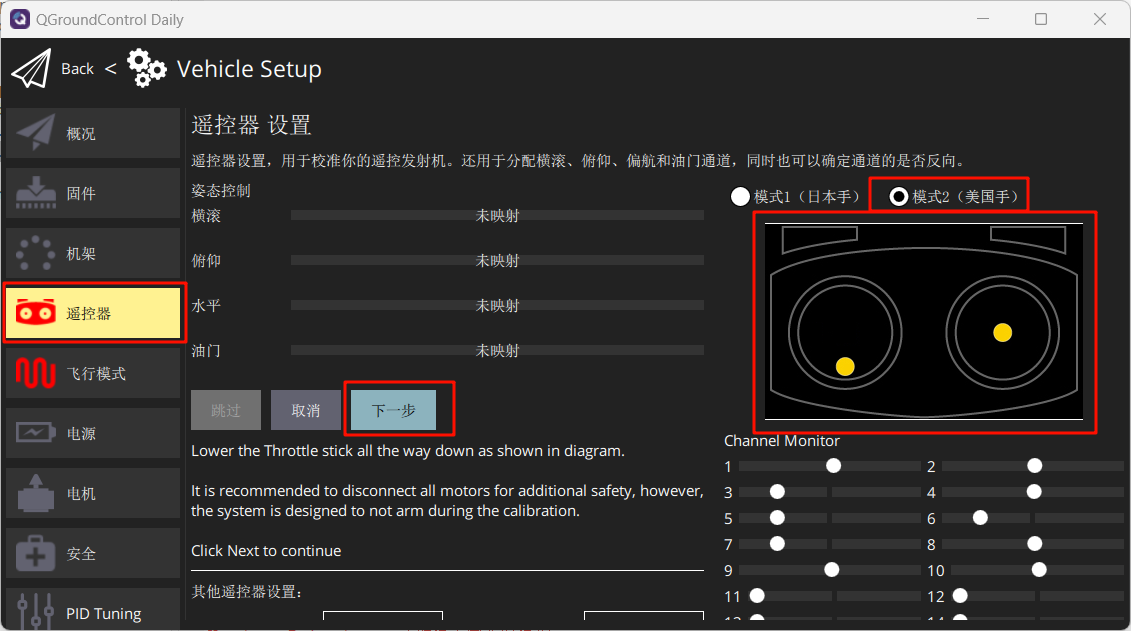
Connect the RC receiver (note the wiring sequence) and power on the remote controller. Calibrate the remote controller as shown in the figure.
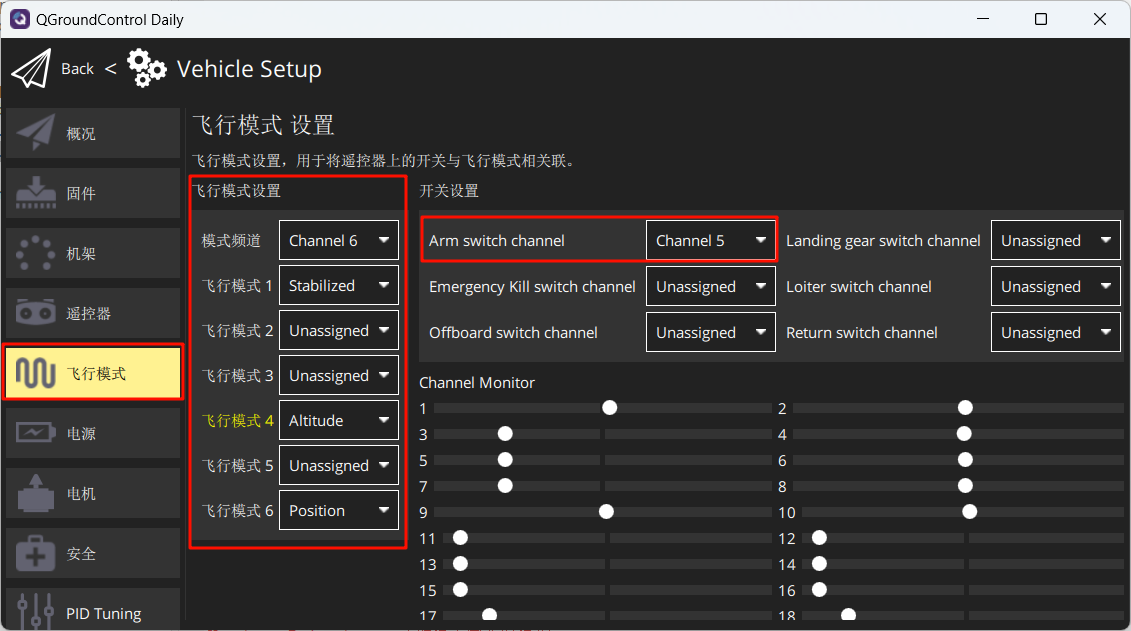
Set the flight modes as shown below.
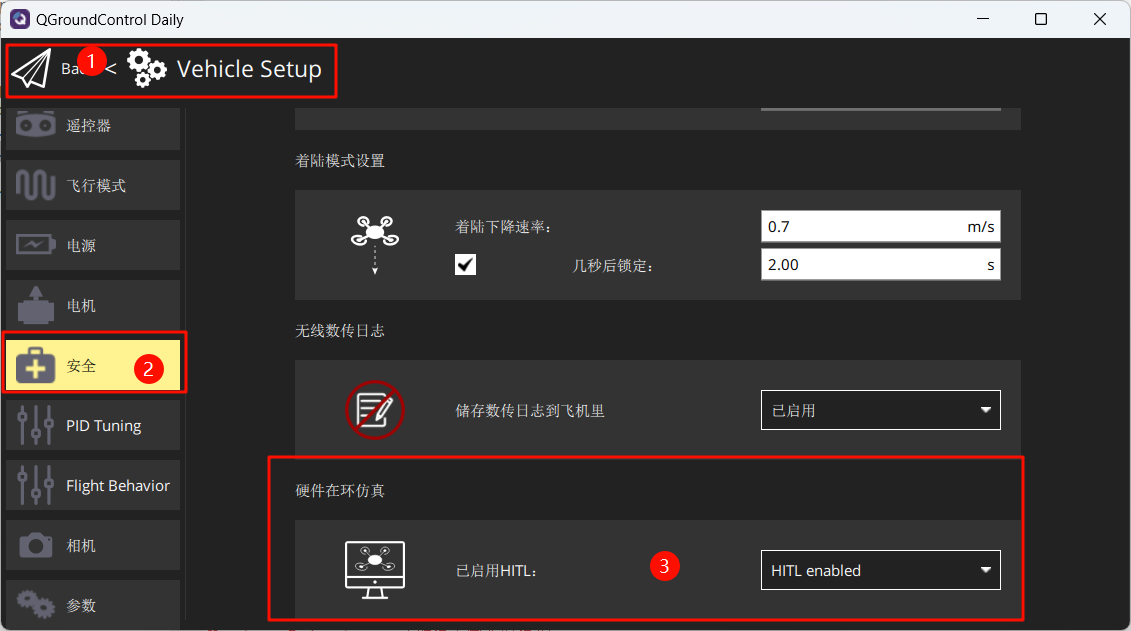
In the Safety settings, enable only Hardware-in-the-Loop (HIL) simulation.
4. Start Hardware-in-the-Loop (HIL) Simulation¶
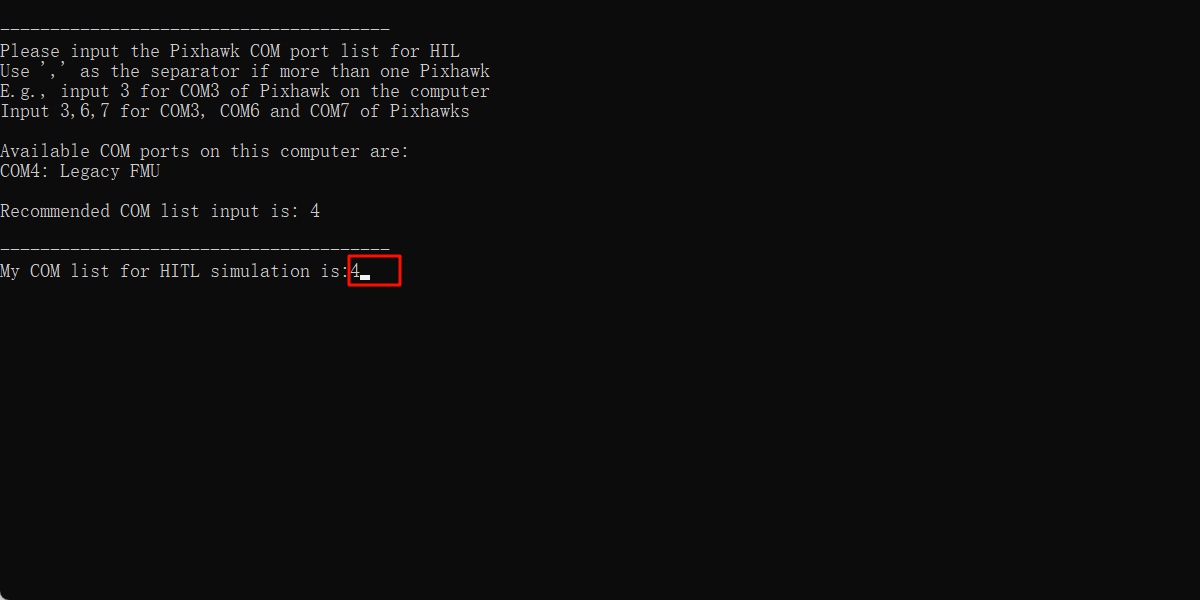
After completing the above settings, close QGC. Run the "[Installation Directory]\Desktop\RflyTools\HITLRun.lnk" script as Administrator.
In the pop-up cmd window, enter the flight controller’s COM port number (e.g., 4).
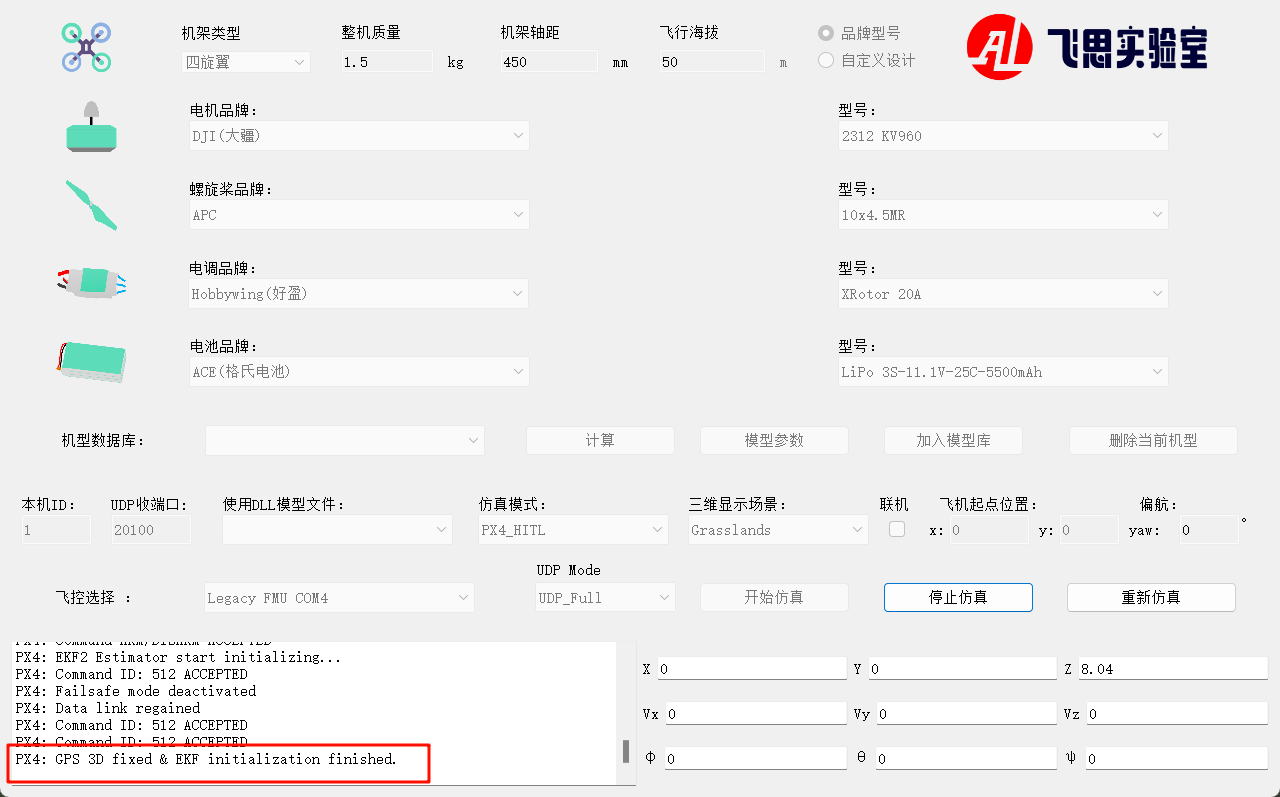
Wait until the bottom-left corner of CopterSim displays: PX4: GPS 3D fixed & EKF initialization finished.

Disarm the aircraft via the CH5 channel on the remote controller, and then take off and control the aircraft flight.