Toolchain Long-Term Support for Flight Controller Introduction ¶
1. CubepPilot Cube Orange¶
This controller is designed to be used with domain-specific carrier boards to reduce wiring, improve reliability, and simplify assembly. For example, a carrier board for commercial inspection vehicles may include connectivity for companion computers, while a carrier board for racing drones may include ESCs for the vehicle frame. The ADS-B carrier board includes a custom 1090 MHz ADS-B In receiver from uAvionix, providing attitude and position information for commercial manned aircraft within the Cube series. For more information, see: https://docs.px4.io/main/zh/flight_controller/cubepilot_cube_orange.html.

2. RflySim Configuration¶
Use the software installation configuration shown in the figure below, and the hardware connection configuration shown in the lower-right figure.
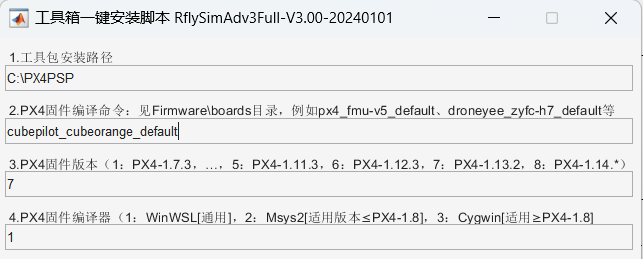
- Use the
cubepilot_cubeorange_defaultcompilation command. - Select version “7”: PX4 1.13.2 firmware.
- Select compiler “1”: WinWSL compiler.
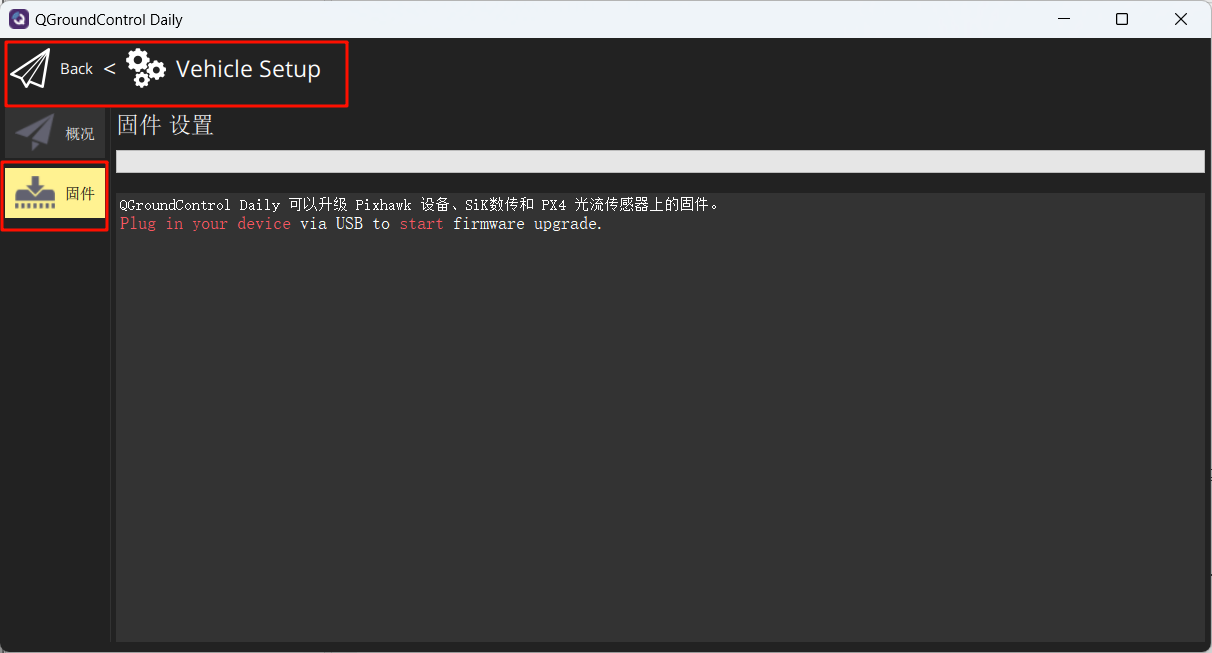
3. Official Firmware and Restoration¶
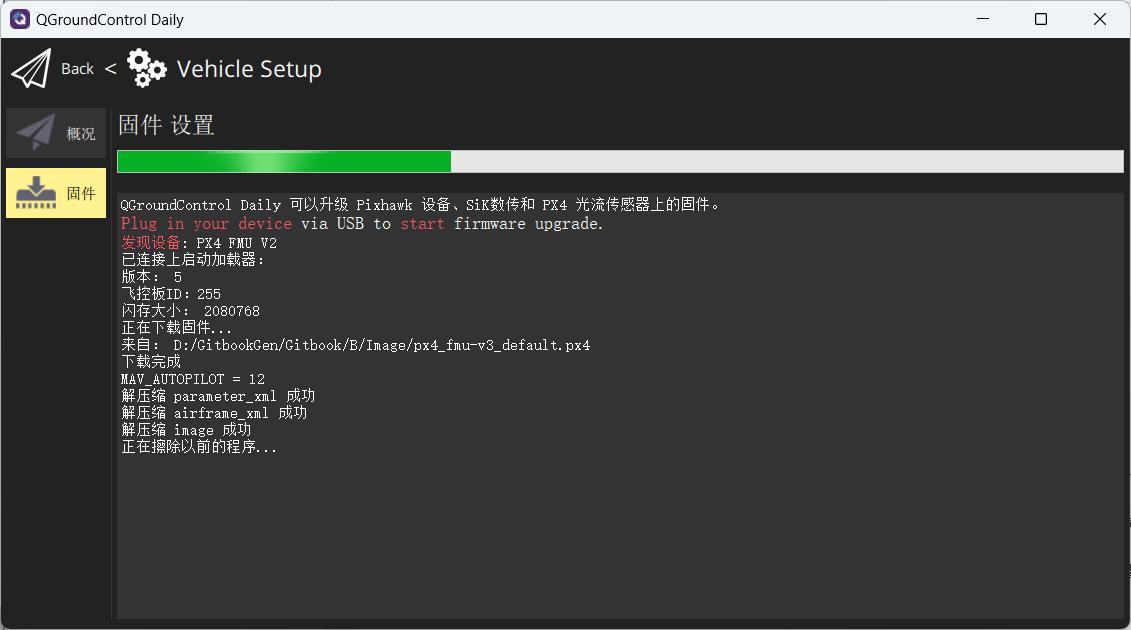
Open QGroundControl (QGC) and navigate to the following interface.
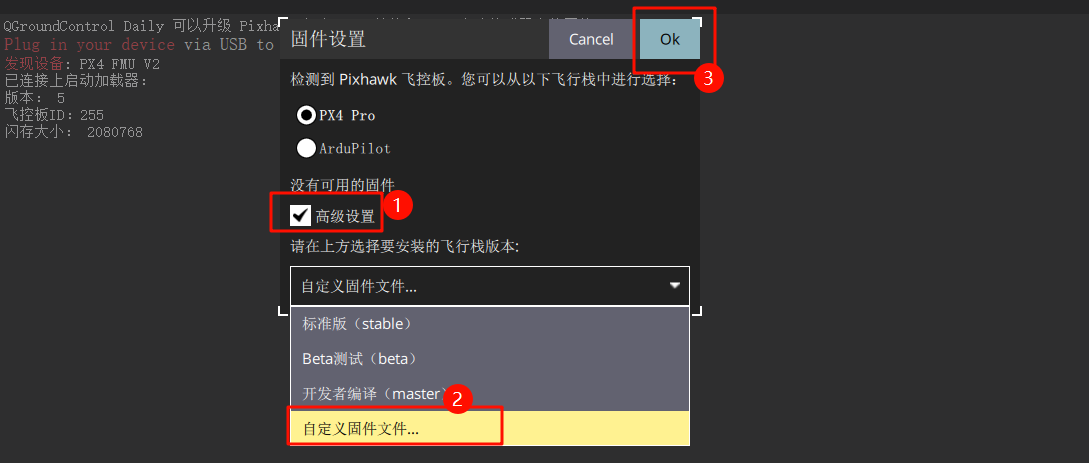
Connect the flight controller to the computer. In the pop-up interface, select the following option to flash the firmware: cubepilot_cubeorange_default.px4
Wait for the firmware flashing process to complete.
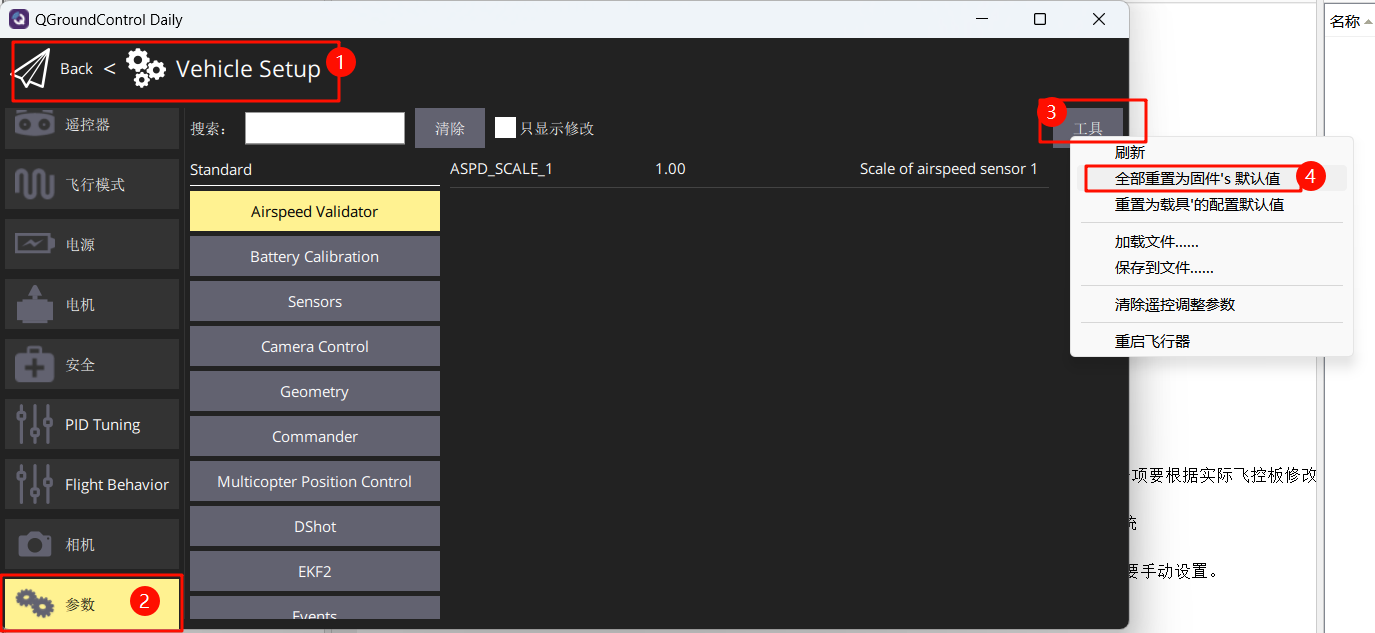
Restore the flight controller parameters to their default values defined by the firmware.
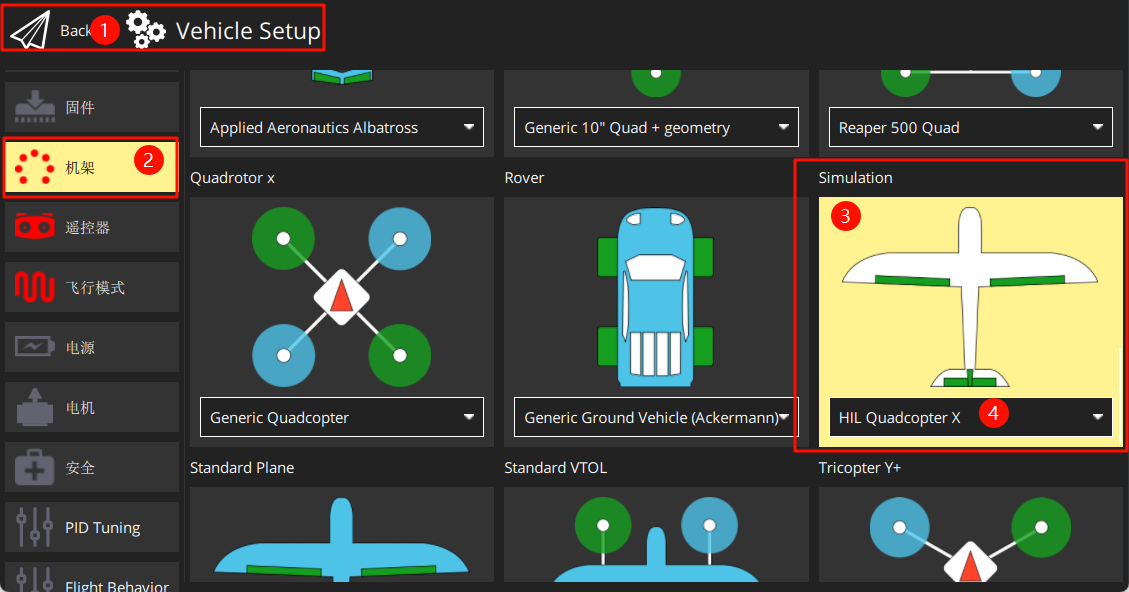
Set the airframe to “HIL Quadcopter X”, scroll to the top, and click “Apply and Restart”. Wait for the restart to complete.

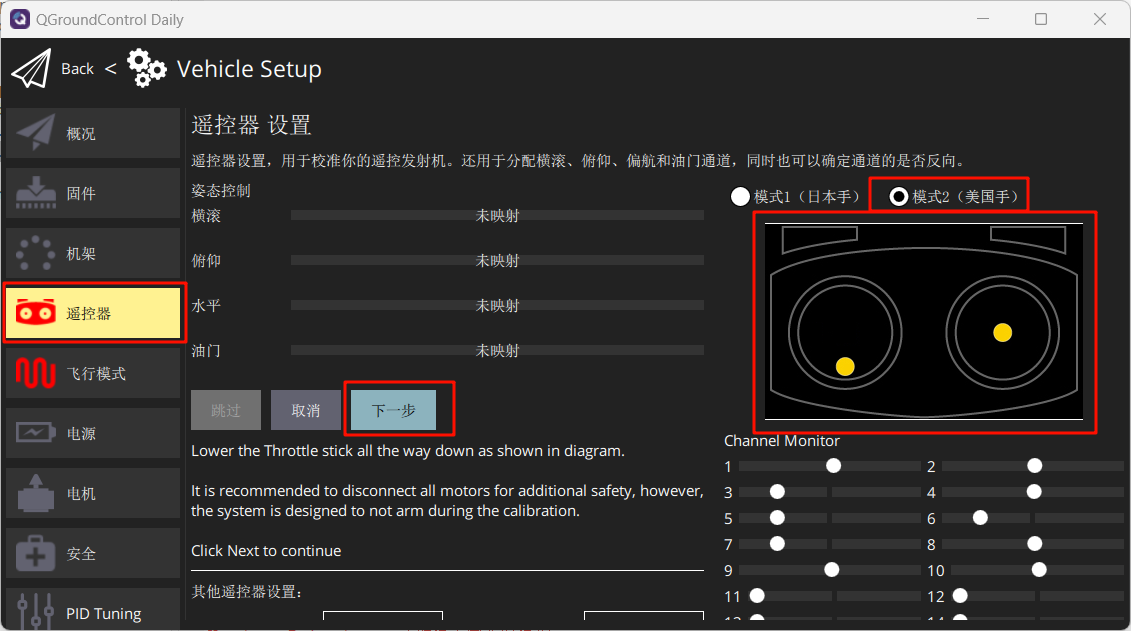
Connect the remote control receiver (note the wiring sequence) and power on the remote control. Calibrate the remote control as shown in the figure.
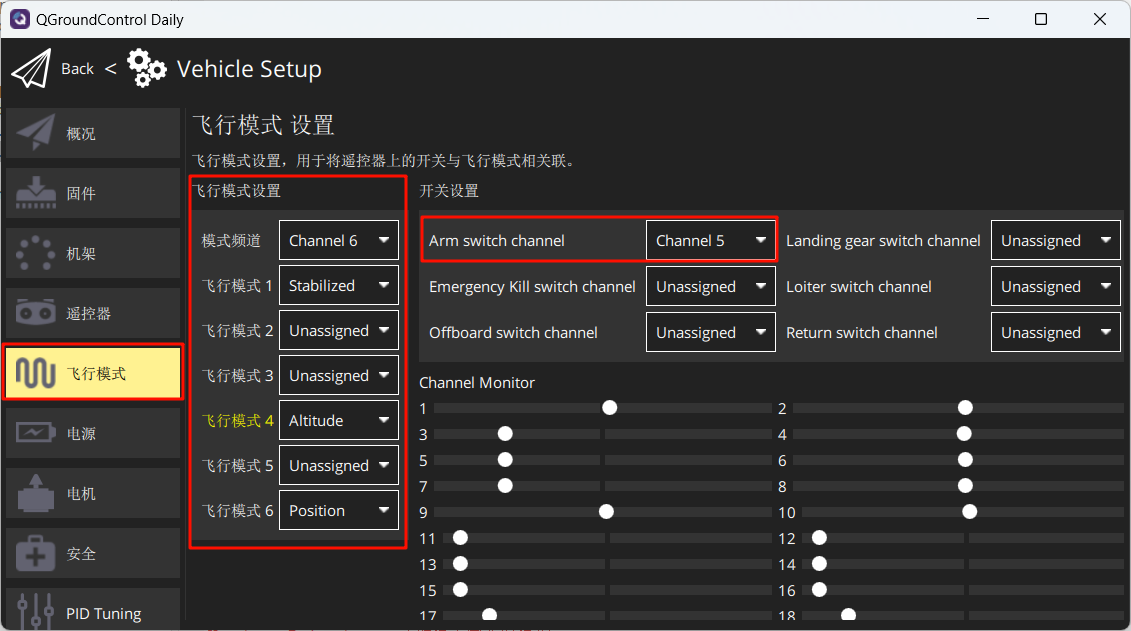
Set the flight modes as shown in the figure below.
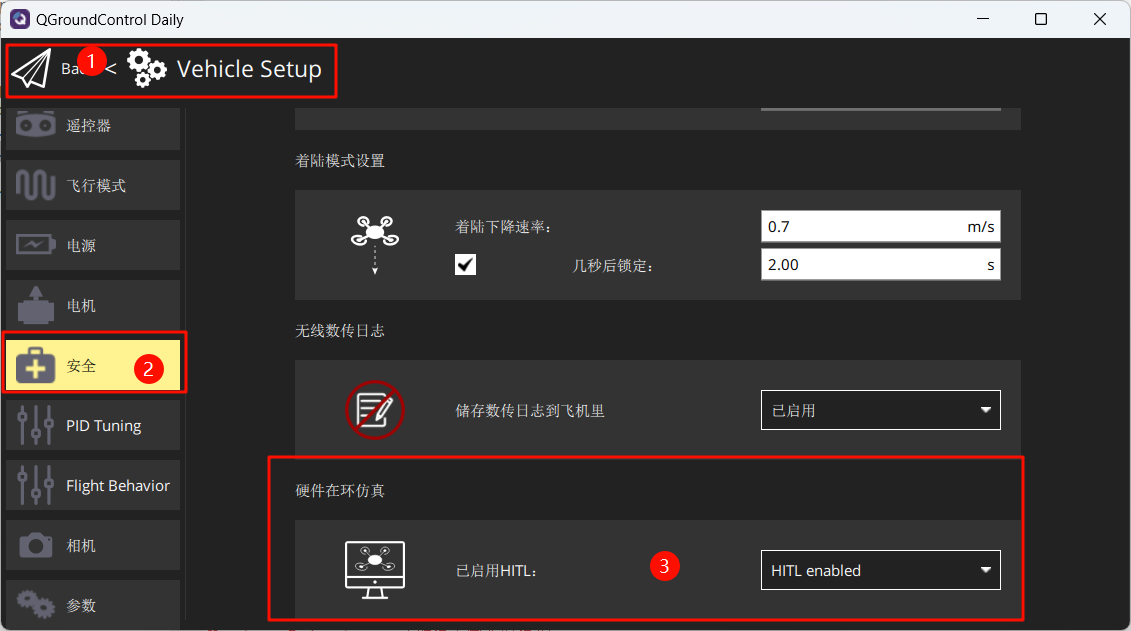
Under the “Safety” section, enable only Hardware-in-the-Loop (HIL) simulation.
4. Launch Hardware-in-the-Loop (HIL) Simulation¶
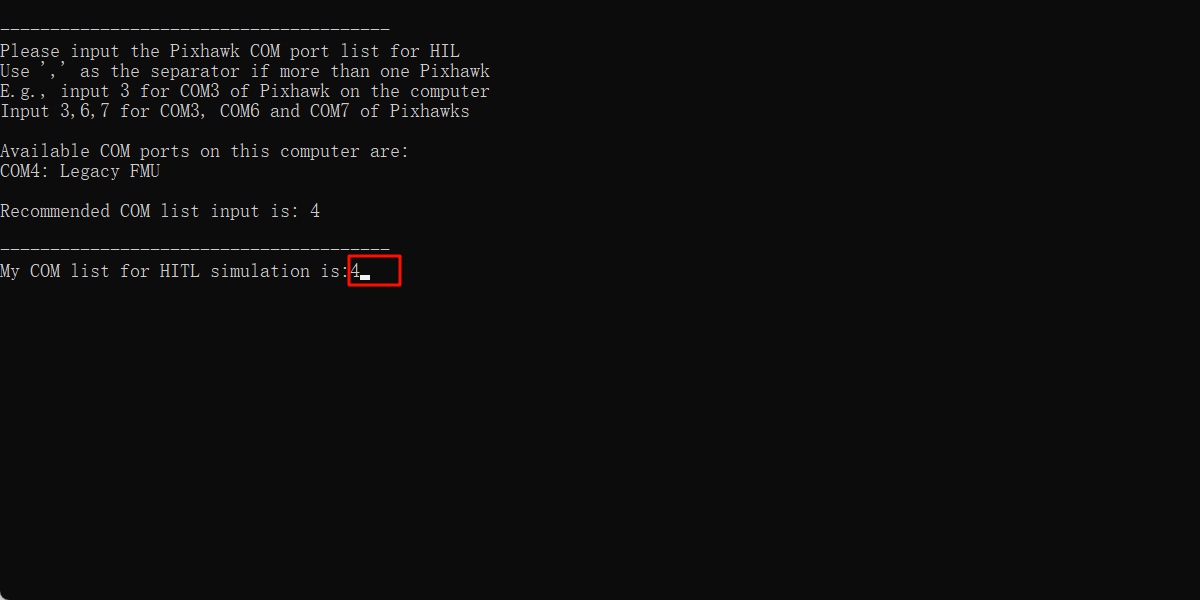
After completing the above setup, close QGC. Run the "[Installation Directory]\Desktop\RflyTools\HITLRun.lnk" script as Administrator. In the pop-up cmd window, enter the flight controller’s port number (e.g., 4).
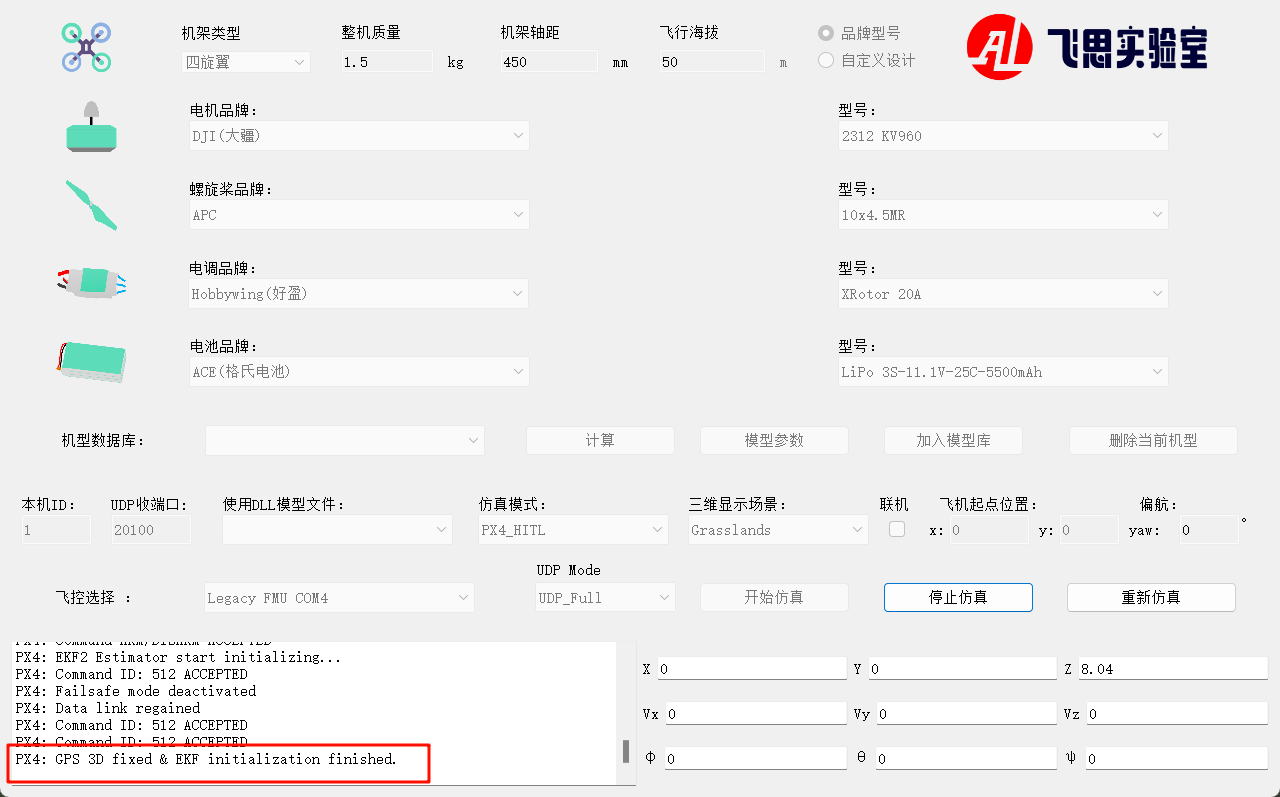
Wait until the bottom-left corner of CopterSim displays: “PX4: GPS 3D fixed & EKF initialization finished.”

Disarm the vehicle using channel CH5 on the remote control, then take off and control the aircraft flight.