Toolchain Overview¶
What is RflySim?¶
RflySim (Reliable Flyght Simulation) is a professional, free, and open-source automated design and development toolchain for intelligent unmanned swarm systems, jointly developed by the Feisi Lab of Beijing Zhuoyi Intelligent, the Xunhua Dai Team from Central South University, and the Quan Quan Team from Beihang University. This toolchain provides a full-process automated solution covering algorithm development, hardware-in-the-loop simulation, and real-world deployment experiments, aiming to meet diverse development and testing needs in areas such as unmanned agent control, swarm planning, and visual navigation.
Core Design Philosophy
RflySim deeply implements the Model-Based Design (MBD) concept, integrating system design, modeling, simulation, and verification onto a unified platform (e.g., MATLAB/Simulink), while extensively incorporating mainstream open-source and commercial ecosystems such as Python, ROS/ROS2, and Unreal Engine to achieve a full-stack collaborative development loop of "low-level stable control + high-level perception and decision-making".
Toolchain Version Tiers¶
The RflySim toolchain not only provides a free basic version for general developers but also offers advanced solutions for more complex, high-quality enterprise or military testing requirements. Currently, it is divided into three major version tiers:
| Version Name | Main Features & Included Content | Applicable Scenarios & Users | Acquisition Method |
|---|---|---|---|
| Free Version | Includes core SITL/HITL single-machine simulation, Python/ROS development interfaces, and supporting tutorial courses for fundamental simulation and validation. | University teaching, individual learning, and beginner-level algorithm development/validation. | Direct ISO installation package download from the official website. |
| Full Version | Includes multi-machine distributed and swarm simulation, UE5 high-fidelity rendering support, complex environment adaptation, latest PX4 firmware, and hardware integration with the swarm box. | Research institutes, collaborative and swarm project validation for unmanned systems. | Released selectively; please contact the official after-sales team. |
| Custom Version | Offers interface customization for specific projects, third-party autopilot/avionics black-box integration, high-level safety testing (e.g., FPGA simulation), and specialized training services. | Enterprise R&D, military applications, and high-level safety certification testing. | Deep customization development upon signing a requirements contract. |
Detailed Version Comparison
For more granular details on feature coverage and technical support differences, please visit 🔎 Version Comparison Details 🔎 . For the Full Version and above, please contact Feisi Lab directly via email (service@rflysim.com).
Supporting Teaching Equipment Purchase¶
To help developers bridge the final "last mile" from simulation-driven development to hardware implementation, we offer a comprehensive suite of supporting hardware products:

The official Feisi Lab Taobao store is now live! We regularly launch software and hardware products or teaching equipment tailored for unmanned system development. Core products currently available include: Hardware-in-the-Loop Simulation Kits (including autopilots, carrier boards, and surrounding signal chain devices), Feisi MiniQuad150 UAV Development Platform, Feisi Unmanned System Vehicle Dynamic Model Packages, and Unmanned System Visualization Assets (rich UE scenes and special effects resources). 👉 Store Direct Link: https://rflysim.taobao.com/

Development Background & Platform Advantages¶
Currently, drones and unmanned systems are rapidly advancing toward swarm intelligence, autonomy, and intelligence. However, in transitioning from laboratory research to complex real-world applications, a significant "gap" often exists between traditional pure-software simulation and physical flight testing: on one hand, some conventional simulation tools lack sufficient computational power or fidelity to provide credible environments for advanced vision algorithms and swarm confrontation; on the other hand, direct real-aircraft testing is inefficient and carries high safety and damage risks.
Against this backdrop, the RflySim toolchain has emerged with the following core platform advantages:
- Seamless Sim-to-Real Transition: Users do not need expertise in embedded C/C++ programming; they can directly generate C/C++ flight control code from MATLAB/Simulink and deploy it with one click, achieving zero-switching transition from hardware-in-the-loop validation to real-flight testing.
- High Inclusiveness for Full-Stack Development: No need to master extensive low-level software/hardware communication principles. Standardized TCP/UDP/serial protocols and user-friendly Python/ROS APIs enable rapid integration of upper-layer algorithms such as perception control, reinforcement learning, and multi-machine coordination.
- High-Fidelity 3D Environment and Visual Simulation: Leveraging the underlying Unreal Engine, RflySim delivers precise rendering of shadows, lighting, occlusion, and collision feedback, generating high-quality training data suitable for deep learning.
Overall Architecture & Core Components¶
The RflySim toolchain is a tightly integrated complex system, where several core modules collectively form a complete simulation loop.
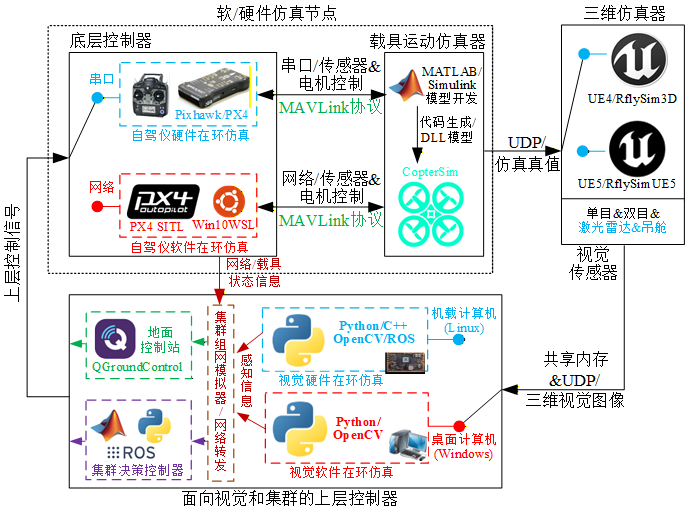
Core Functional Components Overview¶
| Module Category | Core Components / Supported Software | Primary Functions |
|---|---|---|
| Vehicle Motion Simulator | CopterSim (and extended DLLs) | Performs high-precision 6-DOF rigid-body dynamics computation and physical collision simulation for various vehicles (multi-rotors, fixed-wing, ground vehicles, etc.). |
| Low-Level Controller | PX4 (SITL/HITL), Pixhawk hardware | Handles sensor data fusion, attitude/position loop control, mode management, and generates low-level actuation signals (e.g., motor PWM). |
| 3D Simulator | RflySim3D / RflySimUE5 | Conducts high-fidelity, physically accurate rendering of large-scale 3D environments and generates sensor data feeds (e.g., camera, LiDAR) for simulated vehicles. |
| High-Level Controller | Python, ROS 1/2, C++ | Manages upper-layer high-level decision-making tasks such as computer vision recognition, complex path planning, multi-machine coordination (swarm formation), and reinforcement learning training. |
| Automated Integration Tools | SimCreate, VisCreate, BAT script suite | Enables automated workflows including one-click deployment, environment initialization, custom 3D scene packaging, and one-click swarm takeoff. |
Comparison of Three Core Simulation Modes¶
Depending on the development phase and validation target, RflySim provides comprehensive simulation mode support—from pure software layer, to semi-physical layer, to system black-box layer:
| Comparison Dimension | Software-in-the-Loop (SITL) Simulation | Hardware-in-the-Loop (HITL) Simulation | Advanced: FPGA High-Fidelity Hardware-in-the-Loop Simulation |
|---|---|---|---|
| Core Characteristics | All controller code runs on the host computer (e.g., within WSL/Docker) | Controller code runs directly on actual flight controller hardware (e.g., Pixhawk board) | Reconstructs the low-level sensor signal interface using FPGA, achieving full signal-level simulation |
| Physical Hardware Dependency | ❌ None required (only a PC needed) | ✅ Requires Pixhawk flight controller board and serial connection | ✅ Requires FPGA development board + any third-party autopilot |
| Simulation Clock & Real-Time Performance | Medium, limited by PC system scheduling resources | High, synchronized with the real-time clock of the flight controller hardware | Extremely high, nanosecond/microsecond-level hard real-time response |
| Applicable Development Stage | Early algorithm design, rapid iteration, and swarm logic validation | Deployment co-tuning, validation of hardware performance bottlenecks and stability | Military or industrial certification, boundary safety testing of third-party black-box systems |
Usage Recommendations
- Beginners and swarm algorithm developers: Recommended to use SITL; over 80% of code and logic can be executed on a single PC without purchasing or configuring any hardware.
- System integrators and firmware developers: After the upper-layer software matures, connect to Pixhawk hardware for HITL to identify real hardware issues such as bus bandwidth limitations and interrupt latency.
Comprehensive Development Workflow¶
Based on RflySim, the development workflow of unmanned systems can be subdivided into two typical paths according to complexity and responsibility:
1. Low-Level Control Algorithm and Safety Testing Development Workflow¶
- Design attitude and position controllers for multi-rotor or fixed-wing vehicles using MATLAB/Simulink.
- Utilize Model-Based Design (MBD) to one-click generate PX4 firmware in C/C++ format.
- Conduct Software-in-the-Loop (SIL) and Hardware-in-the-Loop (HIL) testing on the controller, and integrate the built-in fault injection system (e.g., simulating motor failure, GPS loss) for safety redundancy testing.
- After completing hardware-software co-tuning, directly flash the mature firmware onto the real vehicle and conduct outdoor flight tests.

2. Fault Injection and Automated Testing Development Workflow¶
The purpose of fault injection testing is to verify the effectiveness of safety mechanisms and fault-tolerance strategies proposed in system design, software implementation, and hardware architecture, specifically including system response time, diagnostic coverage, and the integrity and correctness of various safety mechanisms under abnormal conditions.
For different development stages and testing environments, the methods and focuses of fault injection vary. Taking the low-level control system development based on the RflySim toolchain as an example, the complete workflow typically includes five phases: modeling, controller design, software simulation, hardware simulation, and real-machine experiment testing. These phases correspond to different levels of development depth—from software unit verification, embedded hardware-software verification, hardware-software co-integration verification, to full-system integration testing. The RflySim toolchain fully supports fault injection testing at all stages, constructing a safety evaluation and verification system covering the entire lifecycle.

3. Perception-Decision and Swarm Control Algorithm Development Workflow¶
In practical unmanned swarm systems, each vehicle must independently perform intelligent perception and autonomous decision-making, and share status information and perception results via network communication, ultimately forming a distributed swarm collaborative perception and control system. Simulating such perception-decision-based swarm systems requires not only real-time generation of multimodal sensor data (e.g., RGB, depth, point clouds) for each vehicle, but also handling massive data volumes in 3D rendering and network communication across multiple vehicles—posing significant system load challenges. RflySim adopts a distributed simulation architecture, effectively supporting the above complex tasks with good scalability and real-time performance.
For a complete distributed intelligent swarm collaborative system, after achieving stable and reliable single-vehicle control, development efforts primarily focus on perception-decision and swarm-coordination algorithms. In practice, these two types of algorithms are typically decoupled to enable parallel development and testing. Moreover, direct multi-vehicle collaborative experiments carry high risks; thus, virtual-physical combined simulation techniques are used to gradually migrate toward real-swarm deployment. The complete development and testing workflow typically involves six phases, covering algorithm verification, system integration, and real-machine deployment in complex environments, progressively achieving the transition from simulation to real-world application.

Regardless of whether you are a researcher familiar with MATLAB control theory, a robotics engineer specializing in C++/ROS LiDAR navigation, or an algorithm developer preferring Python/PyTorch for visual tracking and reinforcement learning, the RflySim toolchain provides tailored interfaces for each. This high degree of inclusivity and ecosystem penetration is the fundamental guarantee enabling the toolchain to achieve "develop once, full-stack integration."