RflySim Full-Stack Unmanned System Toolchain
Important Notice
- 📢 RflySim v5.00 internal beta version has been released! Check the Changelog for the latest features.
- 💼 Our team is continuously recruiting graduate students (Master's/PhD) and engineers/interns in unmanned systems (Beijing/Changsha). Send your resume to: service@rflysim.com
✨ Why Choose RflySim?¶
-
💡 6. Ease of Use: Lightweight Experience for Research and Education
Supports efficient and stable operation on Windows with embedded WSL/Linux toolchain. One-click installation and uninstallation avoids the pitfalls of complex ROS dependency assembly. The platform comes with hundreds of ready-to-use open-source examples and is deeply integrated with domestic operating systems like Kylin at the underlying level, making it the top choice for various R&D and course needs.
-
🧩 7. Functional Completeness: Full-Stack Unmanned System Coverage
Comprehensively integrates all components from the bottom up, covering everything from the most basic model evaluation to "high-level perception, self-diagnosis, route planning, execution decision-making, and even swarm networking" across a complex stack. It can be flexibly extended to achieve heterogeneous compatibility solutions and dynamic system health injection, practically bridging all defect loops in the intelligent system chain.
🧭 Quick Navigation Guide¶
To help developers with diverse backgrounds quickly locate the resources they need, we provide a clear knowledge architecture in the left sidebar. We recommend following this path:
| Your Role | Recommended Learning Path | Core Goal |
|---|---|---|
| 🎓 Students / Beginners | Quick Start → Core Courses | Follow the 10-chapter curriculum system, progressing from theoretical foundations to hands-on implementation |
| 💻 Algorithm Developers | Python SDK / Simulink | Directly consult API and interface specifications for secondary development independent of underlying implementation |
| ⚙️ System Integrators | Software Manual → Hardware Ecosystem | Master the complete workflow from network setup and sensor configuration to hardware selection |
| 🚀 Frontier Researchers | Featured Cases → Advanced Topics | Explore cross-domain applications such as LLM, starting from published top-tier journal paper cases |
📚 Companion Teaching Materials¶
The RflySim platform is accompanied by the textbook series Design and Control of Multirotor Unmanned Aerial Vehicles, authored by Prof. Quan Quan's team. This series systematically covers the entire knowledge framework—from theoretical foundations to practical applications—for unmanned systems. For more details and resources, please refer to Companion Textbooks Overview.
| Textbook Title | Description | Target Audience |
|---|---|---|
| 《Design and Control of Multirotor Unmanned Aerial Vehicles》 | A systematic foundational textbook covering design, modeling, perception, control, and decision-making for multirotor UAVs | Senior undergraduates, graduate students |
| 《Practice of Design and Control of Multirotor Unmanned Aerial Vehicles》 | Eight progressive experiments based on the RflySim platform, following an MBD development workflow | Students taking lab courses |
| 《From Principles to Practice of Multirotor Unmanned Aerial Vehicles》 | An introductory-level textbook, guiding readers from basic concepts to full assembly and tuning procedures | Beginners, hobbyists |
| 《Remote Control Practice of Multirotor Unmanned Aerial Vehicles》 | A comprehensive remote-control practice textbook for vocational students and lower-level undergraduates | Vocational or early-stage undergraduates |
| 《Flight Control Practice of Mini Fixed-Wing Unmanned Aerial Vehicles》 | Full-stack development of fixed-wing UAVs, covering design through to vision-based algorithms | Fixed-wing enthusiasts, researchers |
| 《Intelligent Unmanned System Control Practice》 | Currently in development—stay tuned! | — |
📊 Toolchain Version Tiers¶
The RflySim toolchain not only provides a free, open-source base version for general developers, but also offers advanced solutions tailored for high-quality enterprise or defense-industry testing requirements. Currently, it is divided into three version tiers:
| Version Name | Main Features & Included Content | Applicable Scenarios & Target Users | Acquisition Method |
|---|---|---|---|
| Free Edition | Includes single-machine SITL/HITL simulation core, Python/ROS development interfaces, and foundational simulation and verification capabilities such as accompanying course materials. | University teaching, individual learning, and initial algorithm development and validation. | Download the ISO installation package directly from the official website. |
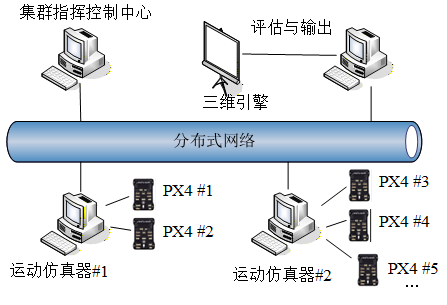
| Full Edition | Includes multi-machine distributed and cluster simulation, UE5 high-fidelity rendering support, complex environment adaptation, latest PX4 firmware, and hardware integration with cluster boxes. | Scientific research institutions, and projects involving collaborative and clustered unmanned systems. | Released selectively; please contact the official after-sales team. |
| Custom Edition | Offers interface customization for specific projects, third-party autopilot/avionics black-box integration, high-level safety testing (e.g., FPGA simulation), and specialized training services. | Enterprise R&D, defense applications, and high-level safety standard testing and certification. | Sign a requirements contract for in-depth custom development. |
Version Comparison Details
For more detailed information on feature coverage and technical support differences, please directly visit 🔎 Version Comparison Details 🔎 . For the Full Edition and above, please contact the Feishi Lab team directly via email (service@rflysim.com) to obtain them.
About This Documentation
This site is designed to provide you with the clearest and most intuitive RflySim user guide and developer reference. The left navigation bar serves as the knowledge graph—feel free to browse and explore at your convenience.
If you encounter any issues during use or have suggestions for improving this documentation, please submit feedback to us via GitHub Issues.
Copyright © Feishi Lab · Beijing Zhuoyi Intelligent Technology Co., Ltd.