PHM 6DOF Block Documentation¶
Toolbox: RflySim PHM
Overview¶
Summary: This block connects the PHM fault-model bus to a quaternion-based six-degree-of-freedom rigid-body model, enabling the calculation of vehicle position, attitude, velocity, and environmental states in fault injection and health assessment simulations.
The PHM 6DOF block contains an environment model and a quaternion-based rigid-body six-degree-of-freedom model. The environment model simulates the effects of gravity, atmospheric pressure, and the GPS origin on flight states; the rigid-body model describes the translational and rotational motion of the unmanned vehicle in the body frame and the Earth coordinate system.
Compared with the basic 6DOF block in the RflySim Model library, this block additionally provides a Fail Model Bus input for receiving mass, inertia, payload, environmental disturbance, or other fault-related quantities generated by the PHM fault injection chain, allowing the dynamic states to reflect the impact of faults on vehicle motion.
Ports¶
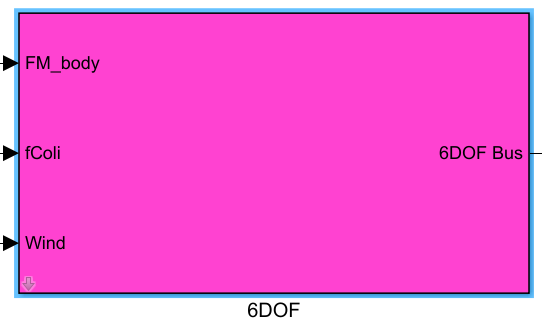
Inputs¶
| Port | Data type | Dimension | Description |
|---|---|---|---|
Force and Moment Model Bus |
Bus |
- | Force and moment model bus that provides the resultant body-frame force and torque |
Fail Model Bus |
Bus |
- | PHM fault-model bus carrying fault quantities that affect dynamics after injection |
fColi |
double |
1x6 |
Collision and friction force/torque vector in the body frame; typically connected to a zero vector when no collision model is used |
Wind |
double |
1x3 |
Wind disturbance vector in the Earth or NED frame; typically connected to a zero vector when no wind model is used |
Outputs¶
| Port | Data type | Dimension | Description |
|---|---|---|---|
6DOF Bus |
Bus |
- | Six-degree-of-freedom state bus encapsulating body velocity and acceleration, Earth-frame velocity, position, Euler angles, direction cosine matrix, angular rate, angular acceleration, and GPS/environment quantities |
Parameters¶
The following parameters can be configured in the Mask dialog opened by double-clicking the block:
| Parameter | Default value | Description |
|---|---|---|
Init_PosE |
ModelInit_PosE |
Initial position in the Earth or NED frame |
Init_VelB |
ModelInit_VelB |
Initial velocity in the body frame |
Init_AngEuler |
ModelInit_AngEuler |
Initial Euler angles |
Init_RateB |
ModelInit_RateB |
Initial angular rate in the body frame |
Param_uavMass |
ModelParam_uavMass |
Vehicle mass |
Param_uavJ |
ModelParam_uavJ |
Vehicle inertia matrix |
Param_GPSLatLong |
ModelParam_GPSLatLong |
GPS origin latitude and longitude |
Param_envAltitude |
ModelParam_envAltitude |
GPS origin altitude |
Block Characteristics¶
| Item | Value |
|---|---|
| Block type | Masked Subsystem |
| Mask Type | 6DOF API |
| Direct feedthrough | No |
| Data communication protocol | No network communication involved |
Usage¶
- Initialize the
ModelInit_*andModelParam_*variables in the MATLAB workspace. - Connect the force and moment model output to
Force and Moment Model Bus. - Connect the PHM fault injection chain output to
Fail Model Bus. - If no collision or wind model is used, connect zero vectors to
fColiandWindrespectively. - Connect the
6DOF Busoutput to sensor, visualization, flight-controller interface, or health-assessment modules.
Notes and Frequently Asked Questions¶
- Bus structure consistency:
Force and Moment Model BusandFail Model Busmust match the bus structures defined in the library; otherwise, simulation initialization will fail. - Parameter initialization: The default parameter values reference MATLAB workspace variables, which must be assigned in the model initialization script before use.
- Closed fault chain: When using payload, inertia, or wind disturbance faults, ensure the corresponding fault quantities correctly enter
Fail Model Bus; otherwise, the faults will not be reflected in the dynamic states. - Frame convention: Inputs and outputs follow the body-frame and NED/Earth-frame conventions commonly used by RflySim. Coordinate consistency must be maintained when connecting custom external modules.
Changelog¶
v4.10(2026-05-07): Added the PHM 6DOF block help document and connected it to the Simulink Help button index.