第5章 滤波估计与底层控制¶
在完成载具的三维建模与运动建模之后,下一步是开发底层控制系统,以确保载具能够根据预定指令稳定运动。对于底层控制系统,滤波估计算法至关重要,它能够从带噪声和误差的传感器数据中提取精确且平滑的状态估计;而底层控制算法则基于滤波估计结果,并结合用户的操控指令,驱动执行器和动力系统实现载具的稳定控制。本章首先回顾滤波与控制的相关背景理论,接着介绍滤波器与控制器的设计方法、开发流程及调参策略。
5.1 背景与理论¶
智能无人系统在控制层面通常可划分为底层控制系统与上层控制系统两个层级。底层控制系统的核心包括载具的滤波与控制(本章内容)、外部控制与轨迹规划(详见第6章)、以及健康管理与安全决策(详见第7章)等关键技术。其主要目标是构建一个由机体系统与控制系统协同组成的基础智能体,实现稳定可靠的位姿状态感知与控制,并通过标准化外部接口接收来自上层系统的决策指令。

5.1.1 滤波估计原理¶
在智能无人系统中,滤波器 和 控制器 是底层控制系统的两大核心模块,直接影响系统的稳定性、精度和自主性。其中,控制器 负责实时调整无人系统的空间位置和姿态,使其能够按照预定轨迹或目标进行运动;滤波器 则通过融合来自多个传感器的数据,提供精确的状态估计(包括位姿、速度等),补偿噪声和误差,为控制器提供可靠的状态反馈。这两项技术相辅相成,协同工作,确保无人系统能够在复杂、动态的环境中高效、稳定地执行任务。
典型的自动控制系统通常由三大核心部分构成:被控对象(Plant)、控制器(Controller)与反馈环节(Feedback)。控制器根据期望值与实际输出之间的偏差计算控制指令;被控对象根据控制指令产生相应动作;反馈环节则通过传感器测量被控对象的实际状态,并将信息反馈给控制器,形成闭环控制系统。
5.1.2 控制器设计基础¶
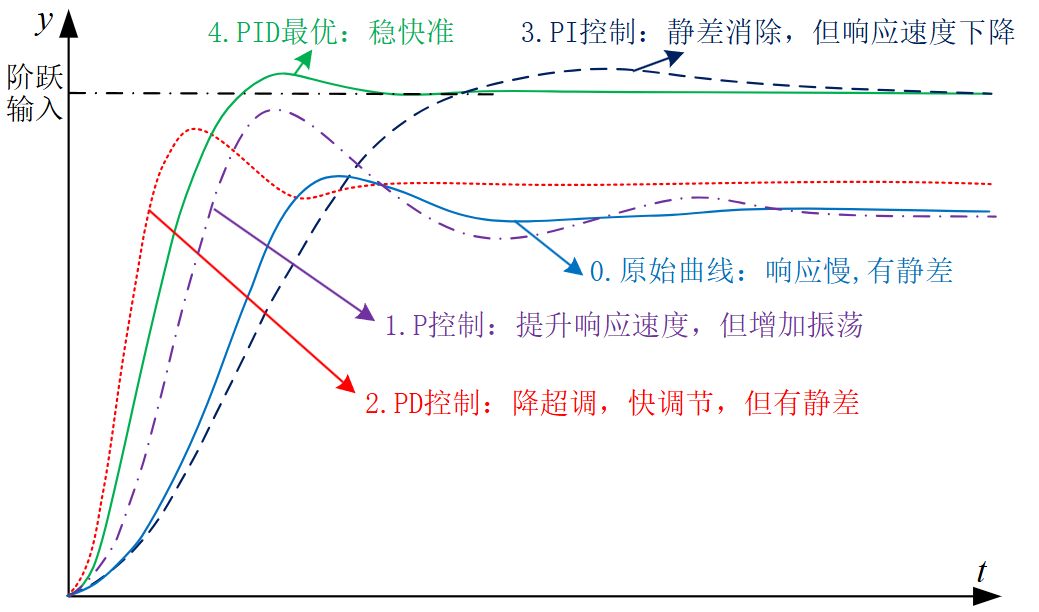
在无人系统领域,常用的控制算法包括 PID 控制、模糊控制、自适应控制、滑模控制等。其中 PID 控制因其结构简单、易于实现而被广泛应用。PID 控制器由比例(P)、积分(I)和微分(D)三个环节组成,通过对误差的过去、现在和未来趋势进行综合调节,实现对被控对象的精确控制。
对于多旋翼无人机而言,典型的控制架构采用串级控制方式:外环负责位置控制,内环负责姿态控制。位置控制器根据目标位置计算所需的姿态角期望值;姿态控制器则根据姿态期望值计算电机控制指令,最终通过电调驱动电机产生相应的拉力和扭矩。

5.2 框架与接口¶
RflySim 采用基于模型设计(Model-Based Design,MBD)的思想,可用于无人系统的控制和安全测试。通过以下五个阶段:建模阶段、控制器设计阶段、软件在环仿真阶段(Software-In-the-Loop,SIL)、硬件在环仿真阶段(Hardware-In-the-Loop,HIL) 和 实飞测试阶段,实现从设计到验证的完整流程。

5.2.1 MATLAB/Simulink 控制器开发¶
在 MATLAB/Simulink 中提供了多旋翼控制器设计的相关接口,用户(初学者、学生或者工程师)可以利用自己所学知识快速进行控制器的设计与验证。平台提供了丰富的模块库,涵盖传感器数据处理、滤波器设计、姿态控制、位置控制等核心功能模块。

通过 MATLAB/Simulink 的自动代码生成技术,控制器能够被方便地自动下载到硬件中,用于 HIL 仿真和实际飞行测试。开发流程如下:首先在 Simulink 中设计和仿真控制器;然后利用 PX4PSP 工具箱生成 C/C++ 代码;接着将生成的代码编译进入 PX4 自驾仪固件中;最后通过工具链提供的下载功能自动部署到飞控硬件。
5.2.2 代码生成与固件部署¶
在控制器设计完成后,RflySim 工具链提供代码生成与下载功能,可以将设计的 Simulink 控制算法生成 C/C++ 代码,然后将其编译进入 PX4 自驾仪固件中,并自动下载到自驾仪中。工具链还提供硬件在环仿真测试功能,用户可以在真实 Pixhawk 自驾仪系统上对飞行效果进行初步模拟测试,排除实飞实验可能存在的各种问题。

测试通过之后,将 Pixhawk 自驾仪装在多旋翼硬件系统上,就可以进行室内和室外的飞行实验,通过实验验证来评估设计控制算法的性能。
5.2.3 传感器接口与数据获取¶
对于传感器标定和滤波器设计,需要获取传感器的原始数据,RflySim 提供了完整的传感器接口。对于控制器,需要获取滤波后的姿态位置信息和遥控器的控制指令,从而能够生成电机控制律。工具链支持通过 MAVLink 协议实时获取飞控内部状态数据,包括传感器原始数据、滤波后的状态估计、控制指令等。

5.3 精彩案例展示¶
飞控底层控制开发系列课程:
Feisi X150 飞机台架实验:
四旋翼三电机失效情况降级控制:
5.4 课程配套视频¶
本章节公开课回放(第四期:滤波估计与底层控制):
5.5 本章实验案例¶
本章相关验证实验与引导案例存放在 [安装目录]\RflySimAPIs\5.RflySimFlyCtrl 文件夹中。
5.5.1 接口学习实验¶
存放在 5.RflySimFlyCtrl\0.ApiExps 文件夹中,涵盖平台基础接口导学及各工具通识入门。
实验 1:底层飞控开发资源文件安装
- 📦 版本要求:
免费版 - 📁 文件地址:0.ResourcesFile/Readme.pdf
📝 实验简介: 介绍RflySim实验所需的驱动软件及学习资源,包括3DR-X 6数传驱动和Pixhawk 6X/6C飞控硬件标准文档的安装与配置。
实验 2:SITL满油门电机控制自动代码生成
- 📦 版本要求:
免费版 - 📁 文件地址:14.SITLVeriGenCodeFirm/1.FullThrottleCodeGen/Readme.pdf
📝 实验简介: 学习使用Simulink TLC语言进行自动代码生成,将控制器模型转换为PX4飞控代码,并在RflySim SITL仿真环境下验证生成的满油门电机控制代码的正确性。
实验 3:软件在环仿真实验
- 📦 版本要求:
免费版 - 📁 文件地址:1.SoftwareSimExps/Readme.pdf
📝 实验简介: 基于Simulink/RflySim3D平台的软件在环仿真实验,学习使用Simulink控制器对四旋翼进行解锁和遥控操作,熟悉控制器子系统、姿态控制、电机分配等核心模块的工作原理。
实验 4:QGC参数实时调整
- 📦 版本要求:
免费版 - 📁 文件地址:10.QGC-Param-Tune/Readme.pdf
📝 实验简介: 在QGC地面站中实时观察飞行状态并调整Pixhawk飞控参数SL_RFLY_FLT和SL_RFLY_INT,实现最佳控制效果
实验 5:飞控状态数据获取
- 📦 版本要求:
免费版 - 📁 文件地址:11.StateDataGatAPI/Readme.pdf
📝 实验简介: 通过RflySim底层开发接口,获取载具姿态、电池、传感器融合、GPS、IMU等关键状态数据,学习使用uORB消息读取接口进行飞控状态监控。
实验 6:自驾仪CPU使用率查看
- 📦 版本要求:
免费版 - 📁 文件地址:12.AutopilotCPUUsageGet/Readme.pdf
📝 实验简介: 本实验演示如何通过QGroundControl的Mavlink控制台查看PX4自驾仪系统的CPU占用率,学习使用top命令和px4_simulink_app相关命令监控飞控负载,避免因算法复杂度导致CPU超负载而实验失败。
实验 7:Simulink函数模块资源占用对比
- 📦 版本要求:
免费版 - 📁 文件地址:13.Simulink_MS_FuncVS/Readme.pdf
📝 实验简介: 对比Simulink中M-Function与S-Function模块在飞控硬件上的资源占用情况,通过在Pixhawk6C上运行累加算法测试,证明S-Function比M-Function更节省飞控CPU和内存资源
实验 8:RC遥控器信号处理模块
- 📦 版本要求:
免费版 - 📁 文件地址:15.InputSourceAPI/Readme.pdf
📝 实验简介: 验证RC遥控器信号处理功能,包括InputRcCali校准模块、InputRcNorm归一化模块和RCOverCtrlAPI手动控制覆盖功能,确保遥控器准确可靠控制飞行器。
实验 9:执行器控制信号API实验
- 📦 版本要求:
免费版 - 📁 文件地址:16.CtrlsSingalsAPI/Readme.pdf
📝 实验简介: 通过发送actuator_outputs_rfly消息驱动CopterSim的inPWMs输入,实现PWM控制、归一化控制、四维/六维扭矩推力控制及PWM/AUX输出测试,验证Simulink控制器在实际飞行中的控制效果。
实验 10:Offboard控制API验证实验
- 📦 版本要求:
免费版 - 📁 文件地址:17.OffboardCtrlsAPI/Readme.pdf
📝 实验简介: 学习Offboard模式下位置、速度、加速度、欧拉角及姿态速率等多种控制方式,通过OffboardAdvCtrlAPI和OffboardAttCtrlAPI等接口实现外部计算机对无人机的控制验证。
实验 11:Mavros通信API仿真控制
- 📦 版本要求:
免费版 - 📁 文件地址:18.MavrosCommAPI/Readme.pdf
📝 实验简介: 学习Mavros通信接口的使用,包括ROS 1和ROS 2环境下的硬件在环、软件在环仿真及C++测试实验
实验 12:VTOL PWM输出硬件在环测试
- 📦 版本要求:
免费版 - 📁 文件地址:19.VTOL_PWM_out_Test/Readme.pdf
📝 实验简介: 基于PX4 1.15.0固件的Pixhawk 6X飞控,实现硬件在环仿真时真实PWM输出,同步控制真实电机和舵机,完成虚实结合的垂起飞机测试验证实验。
实验 13:姿态控制器自动代码生成
- 📦 版本要求:
免费版 - 📁 文件地址:14.SITLVeriGenCodeFirm/2.AttitudeCtrlCodeGen/Readme.pdf
📝 实验简介: 学习使用Simulink TLC机制进行姿态控制器自动代码生成,并在RflySim平台SITL仿真环境下验证生成的飞控代码。
实验 14:PSP工具箱硬件在环仿真
- 📦 版本要求:
免费版 - 📁 文件地址:2.PSPOfficialExps/Readme.pdf
📝 实验简介: 熟悉PSP官方提供的实验资源,通过px4demo_input_rc.slx实验讲解硬件在环仿真流程,掌握通过PSP工具箱访问飞控内部参数的方法,便于调参与测试。
实验 15:四旋翼无人机实飞输出信号验证
- 📦 版本要求:
免费版 - 📁 文件地址:20.FlyCtrlsSingalsTest/Readme.pdf
📝 实验简介: 本实验帮助用户定位四旋翼无人机解锁后电机不转的问题,基于Pixhawk 6X飞控验证PWM和AUX输出接口,学习I/O与FMU的区别及电机驱动调试方法。
实验 16:RePX4Block控制器切换实验
- 📦 版本要求:
免费版 - 📁 文件地址:21.SwitchPX4Simulink/Readme.pdf
📝 实验简介: 本实验通过RePX4Block模块和RC辅助通道(ch8),实现PX4官方控制器与Simulink自定义控制器的实时切换,并验证QGC中的切换提示日志。
实验 17:姿态控制器SIL_HIL实飞实验
- 📦 版本要求:
免费版 - 📁 文件地址:3.DesignExps/Readme.pdf
📝 实验简介: 通过完整姿态控制器开发流程,掌握PID控制器设计、Simulink软件在环仿真、硬件在环仿真及实飞验证技术,完成多旋翼无人机姿态控制全流程学习
实验 18:Offboard转发控制自动代码生成
- 📦 版本要求:
免费版 - 📁 文件地址:14.SITLVeriGenCodeFirm/3.OffboardCtrlCodeGen/Readme.pdf
📝 实验简介: 学习使用Simulink TLC语言进行自动代码生成,掌握在RflySim平台SITL仿真环境下验证Pixhawk飞控自动生成代码的方法
实验 19:QGC烧录飞控固件
- 📦 版本要求:
免费版 - 📁 文件地址:4.PX4Firmwares/Readme.pdf
📝 实验简介: 通过QGC软件烧录PX4飞控固件,熟悉飞控固件还原的方法和途径,掌握固件版本选择与兼容性知识
实验 20:二进制日志记录模块实验
- 📦 版本要求:
免费版 - 📁 文件地址:5.Log-Write-Read/Readme.pdf
📝 实验简介: 使用binary_logger模块完成飞行数据.bin和.ulg格式的写入与读取,熟悉PX4飞控底层运行逻辑
实验 21:自定义uORB消息读写
- 📦 版本要求:
免费版 - 📁 文件地址:6.uORB-Read-Write/Readme.pdf
📝 实验简介: 通过创建自定义uORB消息实现读写功能,掌握PX4的uORB消息系统内部模块间数据交互能力,包含消息读取、函数触发读取、消息发送及ID与文件名不一致处理等实验内容。
实验 22:uORB自定义消息创建
- 📦 版本要求:
免费版 - 📁 文件地址:7.uORB-Create/Readme.pdf
📝 实验简介: 通过创建自定义uORB消息实现读写功能,熟悉并掌握PX4的uORB消息系统,包括消息定义、订阅 actuator_armed 和发布 rfly_px4 消息
实验 23:Mavlink消息回传实验
- 📦 版本要求:
免费版 - 📁 文件地址:8.Mavlink-Msg-Echo/Readme.pdf
📝 实验简介: 通过mavlink_log uORB消息向外回传RC遥控器状态,实时显示系统运行状态
实验 24:PX4外部控制调参
- 📦 版本要求:
免费版 - 📁 文件地址:9.PX4CtrlExternalTune/Readme.pdf
📝 实验简介: 通过外部发送rfly_ctrl消息作为遥控器输入,实现PX4飞控硬件在环仿真。学习外部通信接口配置、三种控制模式切换及Simulink/Python与飞控的数据交互方法。
实验 25:ROS1硬件在环仿真实验
- 📦 版本要求:
免费版 - 📁 文件地址:18.MavrosCommAPI/ROS1HITL/Readme.pdf
📝 实验简介: 在ROS1环境下进行硬件在环仿真实验,通过Msg2SimulinkRosAPI.py与PX4飞控进行ROS1通信,观察MAVLink信息交换,掌握ROS1与飞控的通信方法。
实验 26:ROS1硬件在环仿真
- 📦 版本要求:
免费版 - 📁 文件地址:18.MavrosCommAPI/ROS1SITL/Readme.pdf
📝 实验简介: 本实验主要学习在ROS1环境下进行硬件在环仿真,通过Msg2SimulinkRosAPI.py和PX4MavCtrlV4ROS库实现与Pixhawk飞控的数据交互,观察ROS1的信息交换机制。
实验 27:ROS1 C++通信测试
- 📦 版本要求:
免费版 - 📁 文件地址:18.MavrosCommAPI/ROS1TestC++/Readme.pdf
📝 实验简介: 在WSL Ubuntu环境下通过C++程序观察ROS 1数据交换,学习PX4飞控系统与ROS接口的通信原理和方法
实验 28:ROS2硬件在环仿真实验
- 📦 版本要求:
免费版 - 📁 文件地址:18.MavrosCommAPI/ROS2HITL/Readme.pdf
📝 实验简介: 在ROS2环境下进行硬件在环仿真实验,通过Msg2SimulinkRosAPI.py与PX4飞控通信,观察ROS2的信息交换,学习ROS2通信接口和硬件在环测试方法。
实验 29:ROS2环境下SITL仿真实验
- 📦 版本要求:
免费版 - 📁 文件地址:18.MavrosCommAPI/ROS2SITL/Readme.pdf
📝 实验简介: 在ROS 2环境下进行软件在环仿真实验,学习使用PX4MavCtrlV4ROS库与PX4飞控进行通信和控制,掌握ROS 2与飞控数据交换的方法
实验 30:ROS2环境下C++测试实验
- 📦 版本要求:
免费版 - 📁 文件地址:18.MavrosCommAPI/ROS2TestC++/Readme.pdf
📝 实验简介: 在WSL Ubuntu环境下,通过C++程序利用ROS 2与PX4飞控进行MAVLink通信,实现数据交换。包含SITL和HITL仿真模式,学习MAVROS接口开发,掌握ROS 2节点与飞控的连接配置和问题排查方法。
实验 31:RflySim多旋翼机架类型配置
- 📦 版本要求:
免费版 - 📁 文件地址:1.SoftwareSimExps/icon/Readme.pdf
📝 实验简介: 通过修改Init.m中ModelParam_uavType参数,选择Tricopter、Quadrotor、Hexarotor、Octorotor等不同多旋翼机架类型进行仿真
实验 32:RflySim多旋翼机架类型配置
- 📦 版本要求:
免费版 - 📁 文件地址:3.DesignExps/Exp4.5_Rotarytable/icon/Readme.pdf
📝 实验简介: 通过修改Init.m中ModelParam_uavType参数,选择Tricopter、Quadrotor、Hexarotor、Octorotor等不同多旋翼机架类型进行仿真
实验 33:RflySim多旋翼机架类型配置
- 📦 版本要求:
免费版 - 📁 文件地址:3.DesignExps/FLY_X450/icon/Readme.pdf
📝 实验简介: 通过修改Init.m中ModelParam_uavType参数,选择Tricopter、Quadrotor、Hexarotor、Octorotor等不同多旋翼机架类型进行仿真
实验 34:RflySim多旋翼机架类型配置
- 📦 版本要求:
免费版 - 📁 文件地址:3.DesignExps/FS-J150/icon/Readme.pdf
📝 实验简介: 通过修改Init.m中ModelParam_uavType参数,选择Tricopter、Quadrotor、Hexarotor、Octorotor等不同多旋翼机架类型进行仿真
实验 35:RflySim多旋翼机架类型配置
- 📦 版本要求:
免费版 - 📁 文件地址:3.DesignExps/icon/Readme.pdf
📝 实验简介: 通过修改Init.m中ModelParam_uavType参数,选择Tricopter、Quadrotor、Hexarotor、Octorotor等不同多旋翼机架类型进行仿真
5.5.2 基础使用实验¶
存放在 5.RflySimFlyCtrl\1.BasicExps 文件夹中,面向初学者提供全套配套补充教材库。
实验 1:FlightEval动力系统设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e1-FlightEval/Readme.pdf
📝 实验简介: 基于FlightEval网站熟悉多旋翼无人机动力系统设计流程,分析各项参数(如电机、螺旋桨、电池等)对飞行性能的影响,培养动力系统选型与设计能力。
实验 2:固定翼无人机飞控设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_4/e2-1/Readme.pdf
📝 实验简介: 通过固定翼无人机六自由度动力学建模和控制系统设计,掌握气动参数识别与计算、飞行控制结构设计与参数调节,理解飞行原理、控制方法和仿真技术。
实验 3:固定翼无人机平衡点与模态分析
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_4/e2-2/Readme.pdf
📝 实验简介: 本实验通过MATLAB分析固定翼无人机的平衡点计算、状态空间模型线性化及系统模态分析,帮助用户掌握无人机稳定性分析方法。
实验 4:固定翼无人机视觉控制与环圈穿越
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_4/e2-3/Readme.pdf
📝 实验简介: 基于计算机视觉实现固定翼无人机目标识别与自主飞行控制,掌握视觉控制算法设计和环圈穿越策略,使用MATLAB/Simulink进行建模,支持RflySim3D和FlightGear多仿真环境集成。
实验 5:固定翼无人机航路点跟踪控制
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_4/e2-4/Readme.pdf
📝 实验简介: 实现固定翼无人机按预定轨迹飞行,掌握航路点跟踪控制算法设计和Offboard模式控制方法
实验 6:多旋翼无人机动态建模与参数分析实验
- 📦 版本要求:
免费版 - 📁 文件地址:e2-UavModeling/Readme.pdf
📝 实验简介: 分析多旋翼总质量、转动惯量、螺旋桨推力/拉力系数对飞行性能的影响,在MATLAB/Simulink建立完整的四旋翼飞行器模型,熟悉刚体运动学/动力学模型及欧拉角、四元数、旋转矩阵的姿态表示方法。
实验 7:相机取图实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_2/e2.1/Readme.pdf
📝 实验简介: 通过Python接口获取RGB、灰度、深度三个相机图像,学习视觉传感器配置、数据传输与显示设置
实验 8:固定翼集群Simulink控制实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_2/e2.2/Readme.pdf
📝 实验简介: 通过MATLAB/Simulink和RflySwarmAPI模块实现4架固定翼无人机的位置控制与集群协同仿真,掌握SITL和HITL仿真配置方法
实验 9:固定翼无人机系统辨识实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_5/e3-1/Readme.pdf
📝 实验简介: 学习使用MATLAB系统辨识工具箱,对固定翼无人机速度、航向、高度三个通道的飞行日志数据进行预处理和传递函数模型辨识,掌握制导模型建立方法
实验 10:固定翼无人机气动参数系统辨识实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_5/e3-2/Readme.pdf
📝 实验简介: 以俯仰力矩通道为例,使用最小二乘法和逐步回归法辨识气动参数,对比分析不同幅值和持续时间的偶极方波信号作为激励信号的辨识效果,学习气动参数辨识流程和方法。
实验 11:固定翼无人机滚转力矩通道系统辨识
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_5/e3-3/Readme.pdf
📝 实验简介: 学习使用MATLAB系统辨识工具箱对固定翼无人机滚转力矩通道进行建模,掌握数据预处理、最小二乘法和逐步回归法等系统辨识方法,完成气动参数辨识和模型验证。
实验 12:RflySim传感器标定实验
- 📦 版本要求:
免费版 - 📁 文件地址:e3-SensorCalib/Readme.pdf
📝 实验简介: 利用数据采集模型和飞控采集加速度计和陀螺仪数据,完成互补滤波和卡尔曼滤波器设计;使用LM算法实现三轴加速度计标定,独立完成磁力计标定,理解滤波器参数对滤波效果的影响。
实验 13:固定翼无人机姿态控制
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_6/e4-1/Readme.pdf
📝 实验简介: 搭建固定翼无人机姿态控制器,在Simulink中进行模型软件在环仿真,学习串级PID控制结构并绘制姿态变化曲线。
实验 14:固定翼飞行控制分析实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_6/e4-2/Readme.pdf
📝 实验简介: 调节固定翼无人机俯仰通道PID控制器参数,绘制Bode图分析系统稳定裕度,并对横侧向和高度速度通道进行控制性能分析与优化。
实验 15:固定翼无人机姿态控制系统设计
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_6/e4-3/Readme.pdf
📝 实验简介: 学习使用MATLAB/Simulink建立固定翼无人机姿态控制通道传递函数模型,通过控制系统设计器设计校正控制器,满足稳态误差、截止频率和相位裕度等性能指标
实验 16:小型固定翼无人机姿态控制仿真实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_6/e4-4/Readme.pdf
📝 实验简介: 实现固定翼无人机高度与速度通道的PID控制硬件在环仿真,观察阶跃响应跟踪效果,并验证校正控制系统的稳定性。
实验 17:滤波器设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e4-FilterDesign/Readme.pdf
📝 实验简介: 学习设计互补滤波器和卡尔曼滤波器,对陀螺仪和加速度计数据进行融合处理,实现姿态角解算,并与PX4自带算法比较,分析滤波器参数对滤波效果的影响。
实验 18:固定翼无人机路径跟随控制实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_7/e5-1/Readme.pdf
📝 实验简介: 掌握固定翼无人机L1直线跟随算法和偏距圆弧跟随算法的原理与实现方法,在MATLAB/Simulink环境中搭建路径跟随控制模块,通过软件在环仿真验证路径跟随控制算法的有效性。
实验 19:固定翼无人机Dubins路径规划实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_7/e5-2/Readme.pdf
📝 实验简介: 掌握Dubins路径规划算法原理与实现方法,学会处理障碍物规避和直线隧道约束的路径规划问题,通过MATLAB编程实现复杂环境下的路径规划
实验 20:固定翼无人机路径规划与仿真实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_7/e5-3/Readme.pdf
📝 实验简介: 掌握基于状态机的路径跟随控制方法,使用MATLAB/Simulink进行路径规划仿真,通过代码生成技术将控制算法转换为C代码,并利用软件在环仿真验证完整路径规划与跟随系统。
实验 21:固定翼无人机硬件在环仿真
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_7/e5-4/Readme.pdf
📝 实验简介: 学习将控制算法代码烧录至Pixhawk飞控,掌握在RflySim平台进行硬件在环仿真(HIL)的方法,验证控制算法在实际飞控硬件上的运行效果
实验 22:姿态控制器设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e5-AttitudeCtrl/Readme.pdf
📝 实验简介: 四旋翼飞行器姿态控制系统的设计实验,包括Simulink仿真复现、阶跃响应测试、Bode图扫频分析、PID参数调节及硬件在环验证,实现姿态角速度环和角度环的稳定控制。
实验 23:姿态控制器设计基础实验
- 📦 版本要求:
免费版 - 📁 文件地址:e5-AttitudeCtrl/e5.1/Readme.pdf
📝 实验简介: 通过Simulink设计四旋翼PID姿态控制器,分析控制分配器作用,绘制Bode图分析稳定裕度,完成软硬件在环仿真
实验 24:姿态控制分析
- 📦 版本要求:
免费版 - 📁 文件地址:e5-AttitudeCtrl/e5.2/Readme.pdf
📝 实验简介: 调节PID控制器参数改善多旋翼姿态控制性能,记录超调量和调节时间;通过扫频绘制Bode图分析系统幅频响应和稳定裕度,掌握姿态PID控制原理及RflySim在环仿真方法。
实验 25:姿态控制器设计
- 📦 版本要求:
免费版 - 📁 文件地址:e5-AttitudeCtrl/e5.3/Readme.pdf
📝 实验简介: 建立姿态控制通道传递函数模型,设计PID校正控制器,通过Bode图分析使角速度环相位裕度>65°、截至频率>10rad/s,角度环相位裕度>60°、截至频率>5rad/s,并进行硬件在环仿真验证
实验 26:姿态控制器实飞实验
- 📦 版本要求:
免费版 - 📁 文件地址:e5-AttitudeCtrl/e5.4/Readme.pdf
📝 实验简介: 学习姿态控制器设计并进行实际飞行测试,掌握Pixhawk固件烧录、遥控器配置和飞行日志分析方法
实验 27:微分平坦控制实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_8/e6-1/Readme.pdf
📝 实验简介: 理解微分平坦控制原理,掌握期望轨迹与控制输入关系,在Simulink中搭建基于协调飞行模型的微分平坦控制模块并进行软件在环仿真,验证ENU坐标系下简单轨迹的跟踪效果
实验 28:轨迹生成算法实验-贝塞尔曲线与B样条
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_8/e6-2/Readme.pdf
📝 实验简介: 学习贝塞尔曲线和B-样条曲线的原理与Matlab实现,掌握控制点向量和节点向量的设计方法,通过调整参数观察轨迹变化规律。
实验 29:固定翼无人机路径规划与轨迹跟踪
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_8/e6-3/Readme.pdf
📝 实验简介: 基于人工势场法进行路径规划,结合B样条生成平滑飞行轨迹,通过微分平坦控制实现固定翼无人机精确轨迹跟踪的实验
实验 30:固定翼无人机硬件在环仿真验证
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_8/e6-4/Readme.pdf
📝 实验简介: 通过Simulink模型实现固定翼无人机硬件在环仿真,掌握控制算法代码生成、部署到Pixhawk飞控并进行自动航线飞行验证的完整流程
实验 31:定点位置控制器设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e6-PositionCtrl/Readme.pdf
📝 实验简介: 复现四旋翼Simulink仿真,分析XY轴解耦特性,通过PID参数调节和校正控制器设计实现定点位置控制,进行扫频分析和实飞验证。
实验 32:四旋翼位置控制基础实验
- 📦 版本要求:
免费版 - 📁 文件地址:e6-PositionCtrl/e6.1/Readme.pdf
📝 实验简介: 复现四旋翼Simulink仿真,分析x/y轴通道解耦;通过扫频绘制Bode图分析闭环位置控制系统稳定裕度;完成硬件在环仿真。
实验 33:定点位置控制器PID参数调节与Bode图分析
- 📦 版本要求:
免费版 - 📁 文件地址:e6-PositionCtrl/e6.2/Readme.pdf
📝 实验简介: 通过调节PID控制器参数改善位置控制性能,记录超调量和调节时间,对系统扫频绘制Bode图,分析幅频响应、相频响应及稳定裕度。
实验 34:RflySim位置控制设计
- 📦 版本要求:
免费版 - 📁 文件地址:e6-PositionCtrl/e6.3/Readme.pdf
📝 实验简介: 使用MATLAB ControlSystemDesigner建立位置控制通道传递函数模型,设计校正控制器,使速度控制环相位裕度>75°、截止频率>2.0rad/s,位置控制环相位裕度>60°、截止频率>1rad/s,并进行软硬件在环仿真验证
实验 35:多旋翼位置定点控制实飞
- 📦 版本要求:
免费版 - 📁 文件地址:e6-PositionCtrl/e6.4/Readme.pdf
📝 实验简介: 通过RflySim工具链实现飞思X450无人机的位置定点控制飞行,学习固件烧录、遥控器配置及空中悬停操作。
实验 36:固定翼无人机空中加油对接图像伺服控制
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/e7-1/Readme.pdf
📝 实验简介: 学习基于图像伺服的空中加油对接仿真平台原理,熟悉加油机、受油机、锥套锥管等模块功能,编写图像伺服控制代码实现对接实验,掌握视觉导航控制方法。
实验 37:图像伺服与位置伺服对接控制对比实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/e7-2/Readme.pdf
📝 实验简介: 对比分析IBVS和PBVS在I/II级紊流下的空中加油对接效果,以及相机安装误差对两种控制方法抗扰能力的影响
实验 38:固定翼无人机对接速度控制
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/e7-3/Readme.pdf
📝 实验简介: 设计以受油机相对地面速度为顶层控制接口的图像伺服控制器,在RflySim仿真平台中完成固定翼无人机对接验证,采用LQR方法实现速度控制模式。
实验 39:固定翼无人机空中加油硬件在环仿真
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/e7-4/Readme.pdf
📝 实验简介: 通过MATLAB/Simulink建模加油机运动,使用YOLOv5视觉检测算法识别锥套,实现固定翼无人机自动寻找并对接加油锥套的硬件在环仿真实验,掌握PX4飞控HIL配置与视觉导航控制算法。
实验 40:半自主控制模式设计
- 📦 版本要求:
免费版 - 📁 文件地址:e7-SemiAutoCtrl/Readme.pdf
📝 实验简介: 学习四旋翼三种半自主控制模式(自稳模式、定高模式和定点模式)的设计与切换,通过Simulink控制器仿真和硬件在环实验掌握多旋翼控制技术
实验 41:半自助控制基础实验
- 📦 版本要求:
免费版 - 📁 文件地址:e7-SemiAutoCtrl/e7.1/Readme.pdf
📝 实验简介: 在Simulink平台上分析四旋翼姿态和位置响应特点,通过软件和硬件在环仿真,观察期望姿态为零时的水平位置漂移及油门回中时的高度响应,掌握四旋翼半自主控制方法。
实验 42:半自助控制高度保持
- 📦 版本要求:
免费版 - 📁 文件地址:e7-SemiAutoCtrl/e7.2/Readme.pdf
📝 实验简介: 用遥控器解锁多旋翼实现手动控制,当油门摇杆回中时四旋翼能保持高度稳定,姿态与自稳模式相同,包含软件在环仿真和硬件在环仿真两部分实验。
实验 43:半自助控制基础实验
- 📦 版本要求:
免费版 - 📁 文件地址:e7-SemiAutoCtrl/e7.3/Readme.pdf
📝 实验简介: 在自稳模式基础上实现定点模式,掌握两种模式的区别,利用三段开关实现模式切换,完成软硬件在环仿真实验。
实验 44:四旋翼半自主控制模式切换
- 📦 版本要求:
免费版 - 📁 文件地址:e7-SemiAutoCtrl/e7.4/Readme.pdf
📝 实验简介: 使用遥控器实现四旋翼自稳模式、定高模式和定点模式三种半自主控制模式的切换,掌握飞行模式配置与切换方法。
实验 45:固定翼无人机编队飞行
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_10/e8-1/Readme.pdf
📝 实验简介: 通过Simulink实现7架固定翼无人机编队飞行实验,学习领导者-跟随者编队控制结构和固定翼制导模型,掌握无人机编队飞行方法。
实验 46:固定翼无人机编队噪声与延迟影响分析
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_10/e8-2/Readme.pdf
📝 实验简介: 通过Simulink仿真分析固定翼无人机编队飞行中噪声和延迟因素的影响,观察不同干扰条件下编队控制效果,评估控制方法的鲁棒性
实验 47:虚拟管道固定翼集群飞行控制
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_10/e8-3/Readme.pdf
📝 实验简介: 基于虚拟管道的固定翼无人机集群飞行控制实验,包括无噪声无延迟、有噪声、有延迟等多种干扰场景的对比分析,掌握无人机在受限空间内的控制策略
实验 48:失效保护逻辑设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e8-FailsafeLogic/Readme.pdf
📝 实验简介: 在Simulink仿真环境中实现飞行器返航和着陆的失效保护逻辑,完成硬件在环仿真,学习多旋翼失效保护机制设计。
实验 49:失效保护逻辑设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e8-FailsafeLogic/e8.1/Readme.pdf
📝 实验简介: 介绍多旋翼失效保护的原理和保护机制设计,包括手动控制模式到返航模式或着陆模式的切换,通过分步实验让读者掌握状态转移条件的设计与分析,实现遥控器失联时自动返航着陆功能。
实验 50:失效保护逻辑设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e8-FailsafeLogic/e8.2/Readme.pdf
📝 实验简介: 介绍多旋翼失效保护的原理和保护机制设计,通过基础实验、分析实验和设计实验,由浅入深带领读者领会多旋翼失效保护知识,实现手动控制模式到返航模式或着陆模式的切换。
实验 51:失效保护逻辑设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e8-FailsafeLogic/e8.3/Readme.pdf
📝 实验简介: 学习多旋翼失效保护原理和保护机制设计,实现手动控制模式到返航/着陆模式的切换,掌握遥控器失联时自动返航着陆功能
实验 52:失效保护逻辑设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e8-FailsafeLogic/e8.4/Readme.pdf
📝 实验简介: 实现四旋翼在遥控器失联时自动返航着陆的失效保护逻辑设计,掌握无人机安全返航机制。
实验 53:PX4模块替换实验
- 📦 版本要求:
免费版 - 📁 文件地址:e9-ReplacePX4Module/Readme.pdf
📝 实验简介: 通过屏蔽PX4飞控的uORB消息actuator_controls_0,用Simulink控制器发送该消息,实现对PX4姿态控制器模块的替换,掌握底层飞控开发技术。
实验 54:固定翼无人机气动参数辨识
📝 实验简介: 通过Pixhawk硬件在环仿真采集固定翼无人机飞行数据,使用最小二乘法和递归回归法进行气动参数辨识,掌握无人机气动建模与参数辨识方法
实验 55:固定翼无人机集群硬件在环仿真
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_10/HITL/Readme.pdf
📝 实验简介: 通过硬件在环仿真(HITL)验证固定翼无人机编队飞行控制算法,学习基于虚拟管道的飞行控制器设计,掌握领航者-跟随者编队控制架构和RflySim仿真平台的使用方法。
实验 56:固定翼高度通道制导模型辨识HIL实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_5/e3-4/GuidanceModel_Identification/HeightChannel/Readme.pdf
📝 实验简介: 在硬件在环仿真环境下,使用Pixhawk自驾仪完成固定翼无人机高度通道的制导模型系统辨识,学习MATLAB系统辨识工具箱的使用方法
实验 57:固定翼无人机平飞性能评估
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_3/Readme.pdf
📝 实验简介: 使用MATLAB绘制固定翼无人机需用推力和可用推力曲线,计算最大平飞速度、久航速度和远航速度,分析重量、机翼面积、展弦比、零升阻力对飞行性能的影响,并设计满足15kg货物运输任务的无人机参数。
实验 58:固定翼无人机系统辨识
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_5/Readme.pdf
📝 实验简介: 学习使用MATLAB系统辨识工具箱进行固定翼无人机气动参数辨识,包括数据预处理、基础制导模型辨识、俯仰/滚转力矩通道气动导数辨识,以及硬件在环仿真验证
实验 59:固定翼无人机姿态控制实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_6/Readme.pdf
📝 实验简介: 搭建固定翼无人机姿态控制器,在Simulink中进行模型软件在环仿真。包括俯仰和滚转通道的PID控制、协调转弯控制分析,以及高度速度通道的PID控制硬件在环仿真,调节PID参数改善控制性能并分析系统稳定裕度。
实验 60:固定翼无人机图像伺服对接控制实验
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/Readme.pdf
📝 实验简介: 掌握基于图像伺服的空中加油对接仿真平台原理,熟悉加油机、受油机、锥套锥管、环境和视景模块功能,编写图像伺服控制算法,完成固定翼无人机对接任务
实验 61:Flask REST API示例
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/e7-1/Python/utils/flask_rest_api/Readme.pdf
📝 实验简介: 本实验展示如何使用Flask创建REST API以暴露YOLOv5s模型,学习安装依赖、运行服务并通过请求获取目标检测的JSON结果。
实验 62:Flask REST API目标检测服务
📝 实验简介: 学习使用Flask创建REST API,部署YOLOv5s模型,通过HTTP请求调用模型进行目标检测并获取JSON格式结果
实验 63:Flask REST API YOLOv5模型部署
📝 实验简介: 学习使用Flask创建REST API来暴露YOLOv5s目标检测模型,掌握通过HTTP请求进行模型推理并获取JSON格式结果的方法。
实验 64:Flask REST API目标检测服务示例
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/e7-4/Python/utils/flask_rest_api/Readme.pdf
📝 实验简介: 本示例展示如何使用Flask创建REST API,暴露YOLOv5s模型进行目标检测,学习通过API调用获取模型推理JSON结果的方法。
实验 65:Weights & Biases与YOLOv5结合使用指南
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/e7-1/Python/utils/loggers/wandb/Readme.pdf
📝 实验简介: 介绍如何将Weights & Biases(W&B)与YOLOv5结合使用,包括首次设置、运行监控、高级用法等内容,帮助优化机器学习工作流程。
实验 66:Weights & Biases与YOLOv5结合使用
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/e7-2/IBVS/Python/utils/loggers/wandb/Readme.pdf
📝 实验简介: 学习如何将Weights & Biases(W&B)与YOLOv5结合,用于机器学习实验的跟踪、可视化、协作和模型复现,包括首次设置、查看运行、数据集版本控制等高级用法。
实验 67:Weights & Biases与YOLOv5集成使用
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/e7-2/PBVS/Python/utils/loggers/wandb/Readme.pdf
📝 实验简介: 学习如何将Weights & Biases(W&B)与YOLOv5结合使用,完成模型训练的实时监控、数据可视化、数据集版本管理和模型评估等任务
实验 68:Weights & Biases与YOLOv5集成使用
- 📦 版本要求:
免费版 - 📁 文件地址:e10-FixedWingCtrl/code_9/e7-4/Python/utils/loggers/wandb/Readme.pdf
📝 实验简介: 介绍Weights & Biases(W&B)在YOLOv5中的使用方法,包括首次设置、实时监控训练、模型性能可视化、数据集版本管理和评估,帮助优化机器学习工作流程
5.5.3 进阶开发实验¶
存放在 5.RflySimFlyCtrl\2.AdvExps 文件夹中,进一步熟悉部分底层固件生态配置。
实验 1:LQR控制器设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e5_LQR-CtrlExp/Readme.pdf
📝 实验简介: 学习基于LQR(线性二次调节器)的旋翼无人机姿态控制器设计,包括系统辨识、状态空间建模、极点配置和状态反馈增益计算,提升无人机底层控制器的抗干扰能力。
实验 2:简化倾转旋翼PID控制硬件在环实验
- 📦 版本要求:
免费版 - 📁 文件地址:e6_Tiltrotor_CtrlExp/Readme.pdf
📝 实验简介: 设计倾转旋翼机控制模型,搭建自定义PID控制器,结合倾转过渡策略,实现倾转旋翼无人机在直升机、固定翼及过渡模态的硬件在环仿真与控制。
实验 3:直升机PID控制器姿态控制实验
- 📦 版本要求:
免费版 - 📁 文件地址:e4_HELI-CtrlExp/1.AttitudeControl/Readme.pdf
📝 实验简介: 本实验基于PID控制器设计直升机控制模型,通过Simulink模型搭建、固件编译烧录及硬件在环仿真,实现直升机的姿态控制。
实验 4:LQR姿态控制器设计实验
- 📦 版本要求:
免费版 - 📁 文件地址:e5_LQR-CtrlExp/1.AttitudeCtrl-LQR/Readme.pdf
📝 实验简介: 本实验基于四旋翼状态空间模型设计LQR姿态控制器,包含MATLAB增益计算、HITL仿真验证及PX4源码修改和QGC参数调试,实现对滚转和俯仰通道的优化控制。
实验 5:RflySim底层控制算法开发
- 📦 版本要求:
免费版 - 📁 文件地址:e0_DevWorkflow/1.Low-level_Controller_Dev/Readme.pdf
📝 实验简介: 基于MATLAB/Simulink与PX4飞控开展底层控制器设计,通过软件在环仿真验证控制律可行性,再利用自动代码生成技术部署至Pixhawk硬件,实现从算法设计到真机测试的完整V型开发流程。
实验 6:直升机PID控制器位置控制实验
- 📦 版本要求:
免费版 - 📁 文件地址:e4_HELI-CtrlExp/2.PositionControl/Readme.pdf
📝 实验简介: 基于PID控制器设计直升机控制模型,通过RflySim工具链、Pixhawk飞控等软硬件,实现直升机位置控制,掌握PID控制与位置控制技术
实验 7:直升机PID控制器路径模式控制实验
- 📦 版本要求:
免费版 - 📁 文件地址:e4_HELI-CtrlExp/3.PathControl/Readme.pdf
📝 实验简介: 本实验基于BSC控制器设计直升机控制模型,使用RflySim工具链、Pixhawk飞控等硬件,实现直升机的路径模式控制,学习PID控制与三维路径规划应用。
5.5.4 高阶开发实验¶
存放在 5.RflySimFlyCtrl\3.CustExps 文件夹中,面向高阶用户的自定义开发实验。
实验 1:PX4进阶接口实验
- 📦 版本要求:
完整版 - 📁 文件地址:e0_AdvApiExps/Readme.pdf
📝 实验简介: 基于RflySim平台进行PX4高级开发,包括自定义屏蔽模块输出、重命名应用、加载应用和创建多个PX4应用等进阶功能实验
实验 2:基于扩张状态观测器的飞控设计实验
- 📦 版本要求:
完整版 - 📁 文件地址:e1_ESO-CtrlExp/Readme.pdf
📝 实验简介: 通过设计扩张状态观测器(ESO)估计飞行器系统状态和总不确定性,实现控制器对扰动和非确定性条件的在线补偿,完成无人机跟踪椭圆形轨迹的SITL、HITL和实飞验证。
实验 3:基于强化学习的最优控制飞控设计实验
- 📦 版本要求:
完整版 - 📁 文件地址:e2_RL-CtrlExp/Readme.pdf
📝 实验简介: 利用近似策略迭代算法的强化学习方法,结合扩张状态观测器观测不确定性,通过演员-评论家神经网络近似最优价值函数和控制策略,设计安全反馈项保证闭环系统安全。可进行SITL、HITL和实飞验证。
实验 4:MCC模型补偿控制器设计实验
- 📦 版本要求:
完整版 - 📁 文件地址:e3_MCC-CtrlExp/Readme.pdf
📝 实验简介: 学习设计MCC(Model Compensation Control)模型补偿控制器,涵盖四旋翼姿态、定高、定点及半自主控制目标,包含控制器搭建到SITL、HITL及实飞验证的完整流程。
实验 5:ADRC姿态控制器设计实验
- 📦 版本要求:
完整版 - 📁 文件地址:e4_ADRC-CtrlExp/Readme.pdf
📝 实验简介: 设计四旋翼自抗扰控制器,包含控制器搭建、SITL、HITL和实飞验证,核心是将系统内外扰动统一补偿。
实验 6:自定义倾转旋翼控制模型设计实验
- 📦 版本要求:
完整版 - 📁 文件地址:e6_Tiltrotor_CtrlExp/Readme.pdf
📝 实验简介: 完成倾转旋翼机简化PID控制的数值仿真与硬件在环实验,学习倾转旋翼多模态PID控制器设计与调试方法
实验 7:尾座式无人机控制器设计实验
- 📦 版本要求:
完整版 - 📁 文件地址:e7_Tailsitter_CtrlExp/Readme.pdf
📝 实验简介: 设计尾座式垂直起降无人机的PID控制器,实现旋翼模式、固定翼模式和过渡模式的控制,验证控制器在数值仿真、硬件在环和实飞中的跟踪效果
实验 8:直升机BSC控制器姿态控制实验
- 📦 版本要求:
完整版 - 📁 文件地址:e5_HELI-CtrlExp/BSC/1.AttitudeControl/Readme.pdf
📝 实验简介: 基于Backstepping方法设计直升机姿态控制器,通过MATLAB/Simulink实现并部署到Pixhawk飞控,完成直升机姿态控制的硬件在环仿真实验。
实验 9:直升机PID控制器姿态控制实验
- 📦 版本要求:
完整版 - 📁 文件地址:e5_HELI-CtrlExp/PID/1.AttitudeControl/Readme.pdf
📝 实验简介: 本实验基于PID控制器设计直升机控制模型,通过配置RflySim工具链与Pixhawk飞控,实现直升机的姿态控制,学习PID控制器在飞行器控制中的应用。
实验 10:直升机SMC控制器姿态控制实验
- 📦 版本要求:
完整版 - 📁 文件地址:e5_HELI-CtrlExp/SMC/1.AttitudeControl/Readme.pdf
📝 实验简介: 本实验基于滑模控制(SMC)方法设计直升机控制模型,通过MATLAB/Simulink、RflySim工具链和Pixhawk飞控实现直升机的姿态控制,学习直升机滑模控制的应用。
实验 11:ADRC姿态控制器设计
- 📦 版本要求:
完整版 - 📁 文件地址:e4_ADRC-CtrlExp/1.AttitudeCtrl-ADRC/Readme.pdf
📝 实验简介: 使用ADRC算法实现四旋翼姿态控制,学习ADRC的TD跟踪微分器、ESO扩张状态观测器、NLSEF非线性控制律三个核心组成部分,该实验包含Sim仿真、HIL硬件在环、实飞三个版本。
实验 12:MCC姿态控制器设计实验
- 📦 版本要求:
完整版 - 📁 文件地址:e3_MCC-CtrlExp/1.AttitudeCtrl-MCC/Readme.pdf
📝 实验简介: 本实验针对四旋翼姿态控制目标,设计Model Compensation Control(MCC)模型补偿控制器,包含高阶微分器、补偿函数观测器和模型补偿控制模块,实验流程涵盖SITL数字仿真、HITL硬件在环和实飞验证。
实验 13:自定义屏蔽PX4模块输出
- 📦 版本要求:
完整版 - 📁 文件地址:e0_AdvApiExps/1.CusMaskPX4Code/Readme.pdf
📝 实验简介: 本实验通过替换PX4中姿态角速率环的uORB消息actuator_controls_0,屏蔽PX4模块输出,实现多旋翼姿态控制Simulink模型成功起飞。
实验 14:尾座式无人机PID控制数值仿真
- 📦 版本要求:
完整版 - 📁 文件地址:e7_Tailsitter_CtrlExp/1.Tailsitter_SIM/Readme.pdf
📝 实验简介: 在Simulink中验证尾座式无人机在旋翼模态和固定翼模态下的PID控制效果及模态切换策略
实验 15:倾转旋翼PID控制数值仿真
- 📦 版本要求:
完整版 - 📁 文件地址:e6_Tiltrotor_CtrlExp/1.Tiltrotor_SIM/Readme.pdf
📝 实验简介: 设计倾转旋翼机简化控制模型(直升机模态、固定翼模态、过渡模态),搭建自定义PID控制器,通过数值仿真观察各通道响应并进行调试。
实验 16:MCC定高控制器设计实验
- 📦 版本要求:
完整版 - 📁 文件地址:e3_MCC-CtrlExp/2.AltitudeCtrl-MCC/Readme.pdf
📝 实验简介: 设计MCC(模型补偿控制)控制器实现四旋翼定高控制,包含Sim到实飞的完整流程
实验 17:直升机BSC控制器位置控制实验
- 📦 版本要求:
完整版 - 📁 文件地址:e5_HELI-CtrlExp/BSC/2.PositionControl/Readme.pdf
📝 实验简介: 基于Backstepping方法设计直升机位置控制器,通过Simulink建模与硬件在环仿真,实现直升机定点控制,学习非线性系统反步设计方法。
实验 18:直升机PID控制器位置控制实验
- 📦 版本要求:
完整版 - 📁 文件地址:e5_HELI-CtrlExp/PID/2.PositionControl/Readme.pdf
📝 实验简介: 基于PID控制器设计直升机控制模型,通过RflySim工具链、Pixhawk飞控等硬件在环仿真,实现直升机的位置控制,学习PID控制与位置控制技术。
实验 19:直升机SMC控制器位置控制实验
- 📦 版本要求:
完整版 - 📁 文件地址:e5_HELI-CtrlExp/SMC/2.PositionControl/Readme.pdf
📝 实验简介: 基于滑模控制(SMC)设计直升机控制模型,通过Simulink实现位置控制,学习直升机SMC控制方法与硬件在环仿真流程
实验 20:重命名PX4应用名称
- 📦 版本要求:
完整版 - 📁 文件地址:e0_AdvApiExps/2.RenamePX4App/Readme.pdf
📝 实验简介: 学习基于PX4软件架构和MATLAB自动代码生成,将默认的px4_simulink_app应用重命名为自定义名称并创建新应用
实验 21:双旋翼垂尾硬件在环实验
- 📦 版本要求:
完整版 - 📁 文件地址:e7_Tailsitter_CtrlExp/2.Tailsitter_HIL/Readme.pdf
📝 实验简介: 将数值仿真调试完成的PID控制器迁移到自动代码生成模板中,烧录到Pixhawk飞控实现尾座式无人机的硬件在环仿真与飞行控制。
实验 22:倾转旋翼PID控制硬件在环实验
- 📦 版本要求:
完整版 - 📁 文件地址:e6_Tiltrotor_CtrlExp/2.Tiltrotor_HIL/Readme.pdf
📝 实验简介: 学习将数值仿真调试的PID控制器通过自动代码生成模板烧录到飞控中,实现硬件在环仿真,验证控制器在实际飞控上的运行效果。
实验 23:自定义PX4应用加载与固件编译
- 📦 版本要求:
完整版 - 📁 文件地址:e0_AdvApiExps/3.LoadPX4App/Readme.pdf
📝 实验简介: 学习在RflySim平台中加载自定义PX4应用程序到飞控固件中,掌握PX4应用的加载、编译和烧录流程
实验 24:直升机BSC控制器路径模式控制实验
- 📦 版本要求:
完整版 - 📁 文件地址:e5_HELI-CtrlExp/BSC/3.PathControl/Readme.pdf
📝 实验简介: 基于BSC控制器设计直升机控制模型,实现直升机路径模式控制,学习Backstepping非线性控制方法与直升机三维路径控制应用。
实验 25:直升机PID控制器路径模式控制实验
- 📦 版本要求:
完整版 - 📁 文件地址:e5_HELI-CtrlExp/PID/3.PathControl/Readme.pdf
📝 实验简介: 基于BSC控制器设计直升机控制模型,通过MATLAB/Simulink、RflySim工具链和Pixhawk飞控,实现直升机路径模式控制,学习PID控制与直升机路径跟踪。
实验 26:直升机SMC控制器路径模式控制实验
- 📦 版本要求:
完整版 - 📁 文件地址:e5_HELI-CtrlExp/SMC/3.PathControl/Readme.pdf
📝 实验简介: 基于滑模控制(SMC)设计直升机控制模型,通过RflySim工具链实现直升机路径模式控制,涉及固件编译、参数配置与飞行仿真操作。
实验 27:MCC定点控制器设计
- 📦 版本要求:
完整版 - 📁 文件地址:e3_MCC-CtrlExp/3.PositionCtrl-MCC/Readme.pdf
📝 实验简介: 设计MCC模型补偿控制器实现四旋翼定点控制,包含Sim仿真、HITL硬件在环和实飞验证
实验 28:创建多个PX4应用
- 📦 版本要求:
完整版 - 📁 文件地址:e0_AdvApiExps/4.MultPX4App/Readme.pdf
📝 实验简介: 学习基于PX4多进程架构,通过MATLAB自动代码生成将px4_simulink_app重命名,并创建新的PX4应用,实现多应用同时运行
实验 29:MCC半自主控制器设计实验
- 📦 版本要求:
完整版 - 📁 文件地址:e3_MCC-CtrlExp/4.SemiAutoCtrl-MCC/Readme.pdf
📝 实验简介: Model Compensation Control模型补偿控制器实验,通过高阶微分器(HOD)、补偿函数观测器(CFO)和模型补偿控制模块,实现四旋翼半自主飞行控制
实验 30:PX4功能替换切换
- 📦 版本要求:
完整版 - 📁 文件地址:e0_AdvApiExps/5.RepPX4Func/Readme.pdf
📝 实验简介: 替换PX4控制器模块,拦截并替换输入输出信号,支持随时切换到Simulink控制器或PX4原有模式,用于调试和算法对比
实验 31:六旋翼无人机控制算法开发
- 📦 版本要求:
完整版 - 📁 文件地址:e0_AdvApiExps/6.CusAirframeCtrl/Readme.pdf
📝 实验简介: 基于RflySim平台,将四旋翼底层控制算法框架扩展到六旋翼无人机,学习PX4混控器文件定义和控制分配原理,实现六旋翼自稳飞行