HighLevelMode 模块文档¶
所属工具箱:RflySim Swarm
简介¶
一句话描述:面向无人机集群开发的高阶飞行控制模式管理模块,为PX4飞控提供加工后的控制指令与期望控制量输出,同时提供飞行安全保障机制。
该模块是RflySim Swarm工具链中面向无人机高阶控制的核心预处理模块,支持仿真与实飞场景下的通用调用,既可为初学者提供基础飞行控制的安全保障,也可满足进阶用户的差异化控制需求,兼容位置、速度、加速度三类主流控制模式。模块需配合模式切换模块获取输入指令,会对PX4所需的解锁、上锁、Offboard切换等指令进行重加工,默认按1秒间隔重复发送指令,兼顾指令传输可靠性与网络传输稳定性,同时会结合无人机状态校验结果、当前飞行模式对输出控制量进行限制:非Flying模式下不会输出用户自定义控制量,状态校验未通过时所有输出清零,避免起飞异常或误操作风险。
该模块可对接PX4飞控,通过RflyUdpMavlink模块完成与CopterSim仿真引擎或实机飞控的信息交互,输出标准化总线格式的控制指令与期望控制量,可直接供后续控制逻辑调用,支持单无人机开发与多无人机集群控制场景,预留16维控制输入可扩展复杂自定义控制任务。
端口说明¶
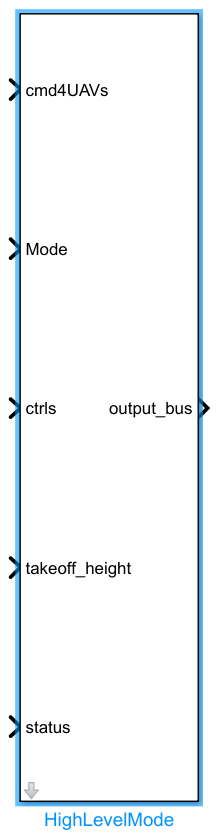
输入端口(Inputs)¶
| 端口名 | 数据类型 | 维度 | 说明 |
|---|---|---|---|
cmd |
double |
1×1 |
飞控控制指令输入,必须由模式切换模块生成,用于发送解锁、上锁、起飞、模式切换等指令 |
mode |
double |
1×1 |
控制模式选择输入,1为位置控制模式、2为速度控制模式、3为加速度控制模式 |
ctrls |
double |
1×16 |
控制量输入,前四维对应控制目标,剩余12维预留扩展,默认填0即可 |
takeoff_height |
double |
1×1 |
自动起飞目标高度,兼容NED坐标系(向下为正),室内起飞到1m高度一般设置为-1 |
check_pass |
double |
1×1 |
无人机状态校验标志输入,为未通过时模块所有输出置0 |
输出端口(Outputs)¶
| 端口名 | 数据类型 | 维度 | 说明 |
|---|---|---|---|
outBus |
Bus |
非标 | 输出控制总线,包含加工后的控制指令、使能标志以及对应控制模式下的期望控制量 |
参数配置(Parameters)¶
本模块无可配参数。
模块特性(Block Characteristics)¶
| 特性项 | 值 |
|---|---|
| 支持的数据类型 | double、single |
| 直接馈通(Direct Feedthrough) | 是 |
| 采样时间 | 继承 |
| 代码生成支持 | 否 |
数据通信协议¶
本模块不涉及网络通信。
相关模块¶
| 模块名 | 说明 |
|---|---|
ModeSwitch |
生成HighLevelMode模块所需的模式控制指令输入 |
RflyUdpMavlink |
输出无人机状态校验标志,可连接到本模块的check_pass输入端口 |
注意事项与常见问题¶
- 初始化与输入来源:本模块的
cmd指令输入必须由RflySim Swarm库的模式切换模块生成,不支持自定义直接输入指令,否则无法正确实现飞控指令的定时重发和模式逻辑处理。 - 坐标系与高度符号:本模块兼容NED坐标系,向下为高度正方向,若需要起飞到1m高度,起飞高度参数应设置为-1,设置符号错误会导致起飞高度异常,出现撞地或者起飞过高问题。
- 控制模式匹配输入:仅支持
mode=1(位置控制)、mode=2(速度控制)、mode=3(加速度控制)三种模式,ctrls控制输入仅需填充前四维,剩余12维必须置0;不同模式下仅对应类型的期望控制量输出有效,非对应模式的输出将保持为0,不要使用无效输出作为控制输入。 - 状态校验逻辑:必须接入RflyUdpMavlink模块输出的
check_pass状态校验信号,若校验未通过,本模块所有输出都会置0,不会输出任何控制指令,属于正常安全逻辑,不属于模块故障。多机集群场景下任意一架无人机校验未通过,对应无人机都不会执行控制指令,保障飞行安全。 - 指令发送规则:本模块默认按1s间隔重发飞控指令,切换模式后首次立即发送一次指令,之后间隔1s重发,不要在外部逻辑中高频重复发送相同指令,避免触发飞控故障或网络拥塞。
- 安全使用建议:位置控制模式(
mode=1)适合初学者使用,速度控制(mode=2)和加速度控制(mode=3)需要使用者具备相应的控制算法基础,手动控制场景下不建议直接使用速度/加速度模式,避免发生飞行异常。 - 非Flying模式安全逻辑:未切换到Flying模式时,本模块会屏蔽所有外部输入的控制量,所有控制输出保持为0,属于预设的安全保障机制,不需要额外调整。
更新日志¶
v4.20(2024-12-09): 初始版本发布,支持位置/速度/加速度三种控制模式输出,集成飞控指令重发机制与状态校验功能,输出标准化控制总线适配集群仿真开发。