RflySim3D 多模态传感器 API 文档¶
本文档描述 RflySim 中所有 多模态传感器 的参数定义。
版本限制总览¶
| 版本 | 支持的 TypeID | 传感器数量限制 | 目标飞机限制 |
|---|---|---|---|
| 免费版 (CurrentVersion < 6) | 1, 2, 3, 4, 5, 8, 10, 20, 21, 22, 23, 30, 31 | 最多 3 个 (SeqID < 3) | 仅 Copter#1 (TargetMountType=4 除外) |
| 付费版 (CurrentVersion ≥ 6) | 全部 18 种 | 无限制 | 无限制 |
付费版独占传感器: Type 6 (声音)、Type 7 (深度点云)、Type 9 (吊舱)、Type 40 (红外灰度)、Type 41 (红外伪彩色)。
通用参数说明 (VisionSensorReqNew)¶
| 字段 | 类型 | 说明 |
|---|---|---|
checksum |
uint16 |
数据校验位,固定为 12346 |
SeqID |
uint16 |
传感器实例序号 ID(唯一标识) |
bitmask |
uint32 |
保留位掩码 |
TypeID |
uint16 |
传感器类型 ID(本文档核心) |
TargetCopter |
uint16 |
绑定的目标飞机 ID(可动态变更) |
TargetMountType |
uint16 |
安装模式(见下方详细说明) |
DataWidth |
uint16 |
数据/图像宽度(像素 或 射线列数) |
DataHeight |
uint16 |
数据/图像高度(像素 或 射线行数) |
DataCheckFreq |
uint16 |
数据更新频率 (Hz),0 时默认 30Hz |
SendProtocol[8] |
uint16[8] |
传输协议参数(见下方详细说明) |
CameraFOV |
float |
相机视场角 (度),仅视觉类传感器有效 |
SensorPosXYZ[3] |
float[3] |
传感器安装位置 (NED, 米) |
EulerOrQuat |
float |
>0.5 使用四元数,≤0.5 使用欧拉角 |
SensorAngEuler[3] |
float[3] |
传感器安装欧拉角 (Roll, Pitch, Yaw, 度) |
SensorAngQuat[4] |
float[4] |
传感器安装四元数 (w, x, y, z) |
otherParams[16] |
float[16] |
各传感器专用参数(见各类型说明) |
传感器安装模式 (TargetMountType)¶
| 值 | 模式 | 说明 |
|---|---|---|
| 0 | 载具固连 | 传感器随载具整体运动(位置+姿态跟随) |
| 1 | 载具底部固连 | 与模式 0 类似,但 Z 偏移减去载具中心高度 |
| 2 | 世界固定 | 传感器位置/姿态使用世界绝对坐标,不跟随任何载具 |
| 3 | Yaw 独立 | 位置跟随载具,但 Yaw 姿态保持世界坐标系 |
| 4 | 传感器附加 | 附加到另一个传感器上,此时 TargetCopter 表示目标传感器的 SeqID |
数据传输模式 (SendProtocol)¶
| 索引 | 字段 | 说明 |
|---|---|---|
[0] |
sendMode |
传输模式: 0=共享内存, 1=UDP 无压缩, 2/3=UDP 视频流 |
[1-4] |
IP 地址 | 当 sendMode=1/2/3 时,指定目标 IP (四段) |
[5] |
端口号 | 当 sendMode=1/2/3 时,指定目标端口 |
[6] |
sendModeEx |
UDP 分片大小 (bytes)。有效范围 100–60000,默认 60000。控制每个 UDP 包的有效载荷大小 |
[7] |
功能标志位 | 各类型含义不同(见各传感器说明) |
注意: Type 5, 7, 10, 20–23, 30, 31 不支持 sendMode 2 和 3 (自动降级为 1)。
传感器类型详细参数¶
Type 1 — RGB 图像¶

| 项目 | 说明 |
|---|---|
| 用途 | 捕获彩色场景图像 |
| 获取原理 | 在传感器位置放置虚拟相机,渲染当前视角的全彩图像 |
| 输出格式 | RGB 彩色图 (W×H×3 bytes) |
| DataWidth / DataHeight | 图像分辨率 (像素) |
| CameraFOV | 相机视场角 (度) |
| otherParams | 无专用参数 |
Config.json 示例¶
{
"VisionSensors": [{
"SeqID": 0, // 传感器序号,填0则自动递增
"TypeID": 1, // 传感器类型:1=RGB
"TargetCopter": 1, // 绑定飞机ID(免费版仅支持1号)
"TargetMountType": 0, // 安装模式:0=载具固连
"DataWidth": 640, // 图像宽度(像素)
"DataHeight": 480, // 图像高度(像素)
"DataCheckFreq": 30, // 数据更新频率(Hz)
"SendProtocol": [0,0,0,0,0,0,0,0], // [0]=传输模式(0:共享内存,1:UDP), [1-4]=IP, [5]=端口, [6]=分片大小, [7]=功能位
"CameraFOV": 90, // 视场角(度)
"EularOrQuat": 0, // 0=欧拉角, >0.5=四元数
"SensorPosXYZ": [0.3, 0, 0], // 安装位置偏移(NED,米)
"SensorAngQuat": [0,0,0,0], // 四元数姿态 (w,x,y,z)
"SensorAngEular": [0,0,0], // 欧拉角姿态 (Roll,Pitch,Yaw,度)
"otherParams": [0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0] // 专用参数(RGB无需设置)
}]
}
Python 取图 Demo¶
以下为所有图像类传感器 (1, 2, 3, 4, 8, 40, 41) 通用的取图流程。后续传感器仅列出差异部分。
import VisionCaptureApi
import cv2, time, sys
vis = VisionCaptureApi.VisionCaptureApi() # 可传入 RflySim3D 的 IP
# 1. 加载 Config.json
vis.jsonLoad() # 默认加载同目录下 Config.json
# 2. 向 RflySim3D 发送取图请求
if not vis.sendReqToUE4():
sys.exit(0)
# 3. 开启取图线程
vis.startImgCap()
# 4. 循环读取图像
while True:
time.sleep(1/30.0)
for i in range(len(vis.hasData)):
if vis.hasData[i]:
cv2.imshow('Img'+str(i), vis.Img[i]) # vis.Img[i]: np.ndarray (H×W×3, uint8, BGR)
cv2.waitKey(1)
# 实时更新传感器参数
vs = vis.VisSensor[0]
vs.CameraFOV = 60
vs.SensorPosXYZ = [0.3, 0, 0]
vis.sendUpdateUEImage(vs)
Python 输出: vis.Img[i] → np.ndarray (H×W×3, uint8, BGR 彩色图)
ROS 数据¶
| 话题 | 消息类型 | 编码 |
|---|---|---|
/rflysim/sensor{SeqID}/img_rgb |
sensor_msgs/Image |
bgr8 |
ROS2 区分: ROS1 使用
rospy.Publisher;ROS2 使用node.create_publisher+QoSProfile(depth=10, reliability=RELIABLE)。需设置VisionCaptureApi.isEnableRosTrans = True启用。
C++ ROS 订阅 Demo¶
ROS1:
#include <ros/ros.h>
#include <sensor_msgs/Image.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/highgui.hpp>
void imageCallback(const sensor_msgs::ImageConstPtr& msg) {
cv::Mat img = cv_bridge::toCvShare(msg, "bgr8")->image;
cv::imshow("RflySim RGB", img);
cv::waitKey(1);
}
int main(int argc, char** argv) {
ros::init(argc, argv, "rflysim_img_sub");
ros::NodeHandle nh;
// 话题名按实际 SeqID 修改,如 /rflysim/sensor0/img_rgb
ros::Subscriber sub = nh.subscribe("/rflysim/sensor0/img_rgb", 1, imageCallback);
ros::spin();
return 0;
}
ROS2:
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/image.hpp>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/highgui.hpp>
class ImgSub : public rclcpp::Node {
public:
ImgSub() : Node("rflysim_img_sub") {
// ROS2 需指定 QoS,与 SDK 发布端保持一致
auto qos = rclcpp::QoS(10)
.reliability(rclcpp::ReliabilityPolicy::Reliable)
.durability(rclcpp::DurabilityPolicy::TransientLocal);
sub_ = create_subscription<sensor_msgs::msg::Image>(
"/rflysim/sensor0/img_rgb", qos,
[this](sensor_msgs::msg::Image::SharedPtr msg) {
auto img = cv_bridge::toCvShare(msg, "bgr8")->image;
cv::imshow("RflySim RGB", img);
cv::waitKey(1);
});
}
private:
rclcpp::Subscription<sensor_msgs::msg::Image>::SharedPtr sub_;
};
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<ImgSub>());
rclcpp::shutdown();
return 0;
}
注意: ROS2 订阅端的 QoS 需与 SDK 发布端一致(
Reliable+TransientLocal),否则无法收到消息。话题名中的sensor0按实际SeqID替换。Demo 例程: [安装目录]\8.RflySimVision\0.ApiExps\1-UsageAPI\4.SendProtocolAPI
Type 2 — 深度图¶

| 项目 | 说明 |
|---|---|
| 用途 | 获取场景中每个像素到相机的距离信息 |
| 获取原理 | 在传感器位置放置虚拟相机,采用浮点精度渲染场景深度 |
| 输出格式 | 16-bit 深度图 (W×H×2 bytes) |
| DataWidth / DataHeight | 图像分辨率 (像素) |
| CameraFOV | 相机视场角 (度) |
| otherParams | 无专用参数 |
Python 输出: vis.Img[i] → np.ndarray (H×W, uint16, 16-bit 深度值)。取图流程同 Type 1,Config.json 中 TypeID 改为 2 即可。
ROS: /rflysim/sensor{SeqID}/img_depth · sensor_msgs/Image · 编码 mono16
Demo 例程: [安装目录]\8.RflySimVision\0.ApiExps\1-UsageAPI\1.ImgSenorAPI\3.DepthCameraDemo
Type 3 — 灰度图¶

| 项目 | 说明 |
|---|---|
| 用途 | 捕获单通道灰度场景图像 |
| 获取原理 | 在传感器位置放置虚拟相机,渲染彩色图像后转换为灰度 |
| 输出格式 | 单通道灰度 (W×H×1 bytes) |
| DataWidth / DataHeight | 图像分辨率 (像素) |
| CameraFOV | 相机视场角 (度) |
| otherParams | 无专用参数 |
Python 输出: vis.Img[i] → np.ndarray (H×W, uint8, 单通道灰度)。取图流程同 Type 1,TypeID 改为 3。
ROS: /rflysim/sensor{SeqID}/img_gray · sensor_msgs/Image · 编码 mono8
Demo 例程: [安装目录]\8.RflySimVision\0.ApiExps\1-UsageAPI\4.SendProtocolAPI
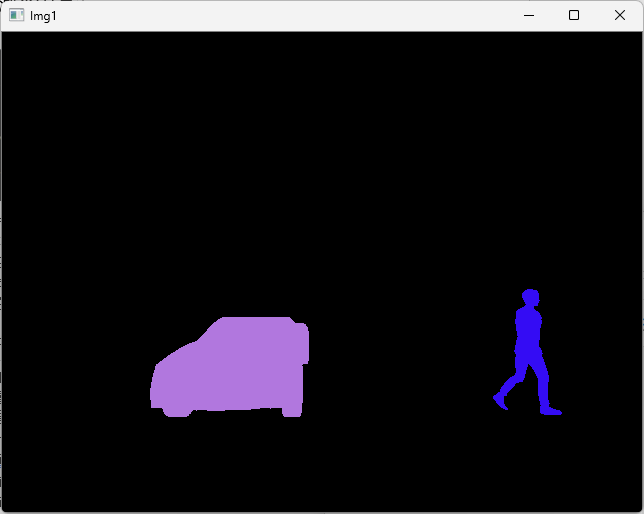
Type 4 — 分割图¶
| 项目 | 说明 |
|---|---|
| 用途 | 语义分割图像,场景中不同物体按其标注值分配不同颜色 |
| 获取原理 | 在传感器位置放置虚拟相机,根据每个物体预设的分割标注值 (CustomDepthStencilValue) 进行着色渲染 |
| 输出格式 | RGB 彩色图 (W×H×3 bytes) |
| DataWidth / DataHeight | 图像分辨率 (像素) |
| CameraFOV | 相机视场角 (度) |
| otherParams | 无专用参数 |
Python 输出: vis.Img[i] → np.ndarray (H×W×3, uint8, BGR 分割图)。取图流程同 Type 1,TypeID 改为 4。
ROS: /rflysim/sensor{SeqID}/img_Segmentation · sensor_msgs/Image · 编码 bgr8
Demo 例程: [安装目录]\8.RflySimVision\0.ApiExps\1-UsageAPI\1.ImgSenorAPI\5.SegmentImageDemo
Type 5 — 测距传感器¶
| 项目 | 说明 |
|---|---|
| 用途 | 单射线距离测量 (前向) |
| 获取原理 | 从传感器位置沿前向发射一条射线,检测与场景物体的碰撞并返回距离 |
| DataCheckFreq | 测距频率 (Hz) |
| 共享内存大小 | 1 + 8 + 14×4 = 65 bytes |
otherParams 定义:
| 索引 | 参数 | 说明 |
|---|---|---|
[0] |
maxRange |
最大测距距离 (米) |
输出数据包含:
- Distance: 测量距离 (米),未命中返回 -1
- disCopterID: 命中目标的 CopterID (-1 为非飞机目标)
- disData[0-2]: 发射点位置 (NED, 米)
- disData[3-5]: 传感器姿态角 (Roll, Pitch, Yaw, 度)
- disData[6-8]: 命中点位置 (NED, 米)
- disData[9-11]: 命中目标中心位置 (NED, 米)
Python 输出: vis.DistanceSensor → DistanceSensor 对象,含 .Distance(米), .CopterID, .RayStart[3], .AngEular[3], .ImpactPoint[3], .BoxOri[3]。
测距传感器通常使用
TargetMountType=4挂载到一个图像传感器上,共享位置和姿态。
Config.json 示例(挂载到 RGB 相机)¶
{
"VisionSensors": [
{
"SeqID": 0,
"TypeID": 1, // 先创建 RGB 相机
"TargetCopter": 1,
"TargetMountType": 0,
"DataWidth": 640,
"DataHeight": 480,
"DataCheckFreq": 30,
"SendProtocol": [1,0,0,0,0,0,0,0], // UDP 模式
"CameraFOV": 90,
"EularOrQuat": 0,
"SensorPosXYZ": [0.3, 0, 0],
"SensorAngQuat": [0,0,0,0],
"SensorAngEular": [0,0,0],
"otherParams": [0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0]
},
{
"SeqID": 0,
"TypeID": 5, // 测距传感器挂载到上方 RGB
"TargetCopter": 0,
"TargetMountType": 4, // MountType=4 挂载到 SeqID=0 的传感器
"DataWidth": 640,
"DataHeight": 480,
"DataCheckFreq": 30,
"SendProtocol": [1,0,0,0,0,0,0,0],
"CameraFOV": 90,
"EularOrQuat": 0,
"SensorPosXYZ": [0, 0, 0],
"SensorAngQuat": [0,0,0,0],
"SensorAngEular": [0,0,0],
"otherParams": [200,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0] // maxRange=200m
}
]
}
ROS: 测距传感器数据不发布独立 ROS 话题,通过 Python vis.DistanceSensor 对象直接访问。
Demo 例程: [安装目录]\8.RflySimVision\0.ApiExps\1-UsageAPI\1.ImgSenorAPI\6.RangingImageDemo
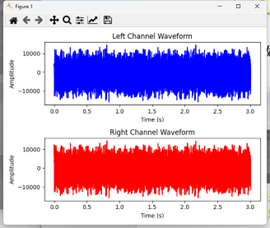
Type 6 — 声音传感器(开发中,付费版)¶
| 项目 | 说明 |
|---|---|
| 用途 | 环境音频采集与分析(如环境音监测、声源定位、语音识别等) |
| 获取原理 | 捕获并输出 RflySim3D 场景中的实时音频数据 |
| 输出格式 | 实时音频数据串流 (支持双声道, 48kHz采样) |
| DataWidth / DataHeight | 无效 |
| CameraFOV | 无效 |
| 共享内存大小 | 不支持共享内存 |
otherParams 定义:
| 索引 | 参数 | 说明 |
|---|---|---|
[0] |
enableAudio |
1: 开启并发送音频数据; 0: 停止发送音频数据 |
网络通信配置 (SendProtocol):
| 索引 | 字段 | 说明 |
|:-:|------|------|
| [0] | sendMode | 1: UDP 传输协议 |
| [5] | 端口号 | 音频数据传输的目标端口号 |
Config.json 示例¶
{
"VisionSensors": [
{
"SeqID": 0,
"TypeID": 6, // 声音传感器
"TargetCopter": 0,
"TargetMountType": 0,
"DataWidth": 0,
"DataHeight": 0,
"DataCheckFreq": 30, // 发送频率
"SendProtocol": [0,127,0,0,1,28003,0,0], // UDP 端口 28003
"CameraFOV": 0,
"EularOrQuat": 0,
"SensorPosXYZ": [0, 0, 0],
"SensorAngQuat": [0,0,0,0],
"SensorAngEular": [0,0,0],
"otherParams": [1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0] // 1: 开启发送
}
]
}
Python 输出: 通过自定义 Socket (Buffer Size: 204800,双声道, 48kHz) 接收 UDP 数据包进行音频解码或处理。
Demo 例程: [安装目录]\4.RflySimModel\3.CustExps\e7_ExternalSensors\e2_Voice_PyRec
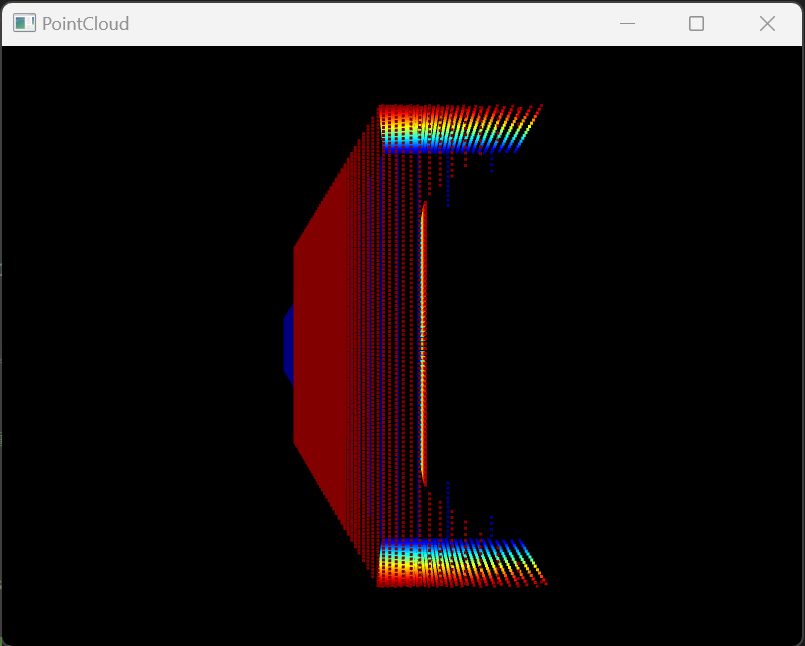
Type 7 — 深度图转点云(付费版)¶
| 项目 | 说明 |
|---|---|
| 用途 | 基于深度图反投影生成 3D 点云 |
| 获取原理 | 先渲染场景深度图,再通过相机内参(针孔模型)将每个像素反投影为 3D 点,同时可选地获取每个点的语义标注颜色 |
| 输出格式 | Int16 编码的 XYZ [+ 语义颜色],每点 3 或 4 通道 |
| 坐标系 | FLU (前-左-上), 相对于 AxisMask 设定的参考系 |
| DataWidth / DataHeight | 深度图分辨率 (像素),影响点云密度 |
| CameraFOV | 相机视场角 (度) |
| 共享内存大小 | 1 + 8 + 9×4 + W×H×3×2 bytes |
otherParams 定义:
| 索引 | 参数 | 说明 |
|---|---|---|
[0] |
maxDepth |
最大深度距离 (米),超出此值的点被过滤 |
[1] |
step / debugMode |
>0 时开启调试模式(绑定 DebugPlane 显示),同时作为采样步长 |
[7] |
AxisMask |
坐标系模式 (见下表) |
SendProtocol[7] 定义:
| 值 | 含义 |
|---|---|
0 |
仅输出 XYZ(每点 3 通道) |
>0 |
输出 XYZI(每点 4 通道),第 4 通道为 RGB555 编码的语义颜色 |
AxisMask 定义:
| 值 | 模式 | 说明 |
|---|---|---|
0 |
飞机坐标 | 使用绑定飞机的绝对位姿 |
1 |
传感器绝对坐标 | 使用传感器自身的绝对位姿 |
2 |
传感器相对坐标 | 使用传感器相对于起始点的位姿变化量 |
Python 输出: vis.Img[i] → np.ndarray (N×3 或 N×4, int16, XYZ[I] 点云),可通过 Open3DShow 模块实时显示。取图流程同 Type 1,TypeID 改为 7。
ROS: 点云数据不通过 SDK 内置 ROS 话题发布,需用户自行转换为 sensor_msgs/PointCloud2。
Demo 例程: [安装目录]\8.RflySimVision\0.ApiExps\1-UsageAPI\3.PointCloudAPI\4.DepthPointCloudDemo
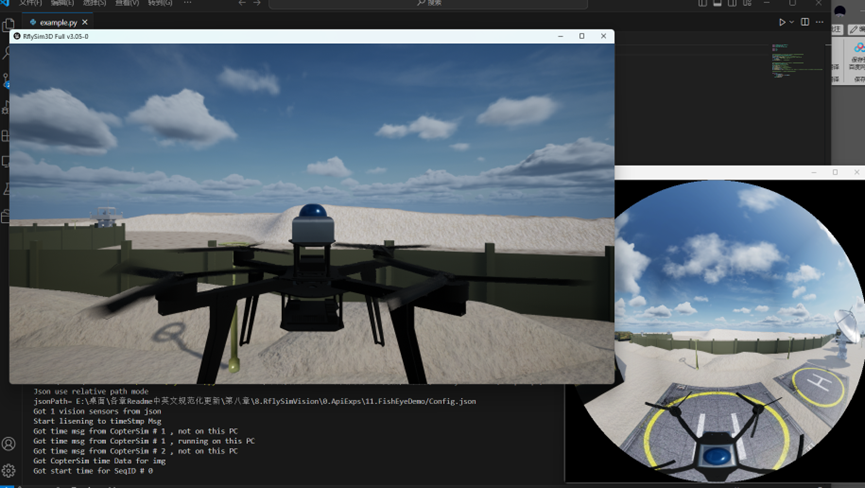
Type 8 — 鱼眼相机¶
| 项目 | 说明 |
|---|---|
| 用途 | 捕获超广角/全景鱼眼图像 |
| 获取原理 | 在传感器位置放置全景立方体相机,同时渲染六个方向的图像,然后通过鱼眼投影模型合成为一张鱼眼图像 |
| 输出格式 | RGB 彩色图 (W×H×3 bytes) |
| DataWidth / DataHeight | 输出图像分辨率 |
| CameraFOV | 鱼眼视场角 |
otherParams 定义:
| 索引 | 参数 | 说明 |
|---|---|---|
[0] |
fisheyeType |
鱼眼投影类型 |
Python 输出: vis.Img[i] → np.ndarray (H×W×3, uint8, BGR 鱼眼图像)。取图流程同 Type 1,TypeID 改为 8。
ROS: /rflysim/sensor{SeqID}/fisheye · sensor_msgs/Image · 编码 bgr8
Type 9 — 吊舱(付费版)¶
| 项目 | 说明 |
|---|---|
| 用途 | 可控吊舱相机,支持姿态控制、角速度控制、目标跟踪、回中、光学变倍、测距及 AI 框选等功能 |
| 获取原理 | 使用电影级虚拟相机模拟吊舱,通过弹簧臂组件实现平滑运动。支持通过控制指令实时调整朝向(四元数 Slerp 插值),可配合目标跟踪自动锁定目标或 GPS 坐标 |
| 输出格式 | RGB 彩色图 (W×H×3 bytes) |
| DataWidth / DataHeight | 图像分辨率 (像素) |
| CameraFOV | 初始视场角 (度),运行中可通过 bitmask 动态修改 |
初始化参数 (otherParams):
| 索引 | 参数 | 说明 |
|---|---|---|
[4] |
OpitcalBaseNum |
光学变倍基数 (范围 4–1000,默认 4) |
[5] |
disNum |
测距最大距离 (米,默认 200) |
吊舱控制 — bitmask 位掩码¶
吊舱通过 VisionSensorReqNew.bitmask 字段进行控制,每个功能对应一个位。多个功能可同时激活。
| 位 (bit) | 功能 | 说明 |
|---|---|---|
1<<1 |
视场角 (FOV) | 直接设置 CameraFOV 字段的值 |
1<<2 |
角度控制 | 吊舱平滑旋转到 SensorAngEuler / SensorAngQuat 指定的目标姿态,以 120°/s 的速度 Slerp 插值移动 |
1<<3 |
四元数模式 | 配合角度控制使用,以四元数方式指定目标姿态 |
1<<4 |
焦距 | 直接设置焦距值 (mm),通过 otherParams[0] 传入 |
1<<5 |
回中 | 吊舱平滑回到初始安装姿态(otherParams[1] > 0 时触发) |
1<<6 |
角速度控制 | 以指定角速度持续旋转,通过 otherParams[2] (Pitch) 和 otherParams[3] (Yaw) 设置角速度 (°/s) |
1<<7 |
光学变倍 | 焦距平滑过渡到 otherParams[4] × OpitcalBaseNum 的目标值 |
1<<8 |
目标跟踪 | 自动跟踪指定目标。otherParams[5] ≥ 0 时按 CopterID 跟踪;otherParams[5] < 0 时按 GPS 坐标 (otherParams[9-11]) 跟踪 |
1<<9 |
测距 | 从吊舱镜头中心发射射线,返回命中距离和命中点坐标 |
1<<10 |
图像类型切换 | 切换吊舱输出的图像类型,由 otherParams[7] 控制(见下表) |
1<<11 |
AI 框选 | 启用 AI 目标检测功能,由 otherParams[8] 控制模式(见下表) |
图像类型切换 (otherParams[7])¶
| 值 | 类型 | 说明 |
|---|---|---|
| 0 | RGB 彩色 | 标准可见光图像(默认) |
| 1 | 红外伪彩色 | 模拟红外热成像的伪彩色图像 |
| 2 | 红外灰度 | 模拟红外成像的灰度图像 |
AI 框选模式 (otherParams[8])¶
| 值 | 模式 | 说明 |
|---|---|---|
| 0 | 关闭 | 不执行 AI 检测 |
| 1 | 全目标框选 | 自动框选视野内所有 Copter 对象(排除自身载具),返回边界框 |
| 2 | 像素点选 | 检测 otherParams[9-10] 指定的像素坐标处的物体,返回该物体的边界框,并可作为跟踪目标 |
Python 输出: vis.Img[i] → np.ndarray (H×W×3, uint8, BGR)。吊舱使用 VisionSensorReqNew 结构体控制(含 bitmask),通过 vis.sendUpdateUEImage(vsrNew) 发送控制指令。
ROS: /rflysim/sensor{SeqID}/img_cine · sensor_msgs/Image · 编码 bgr8
Demo 例程: [安装目录]\8.RflySimVision\2.AdvExps\e1_CameraKeyDemoOnUbuntu
Type 10 — 光流传感器¶
| 项目 | 说明 |
|---|---|
| 用途 | 光流速度估计 + 距地高度测量 |
| 获取原理 | 向地面发射射线测量距地高度;同时对比相邻帧图像像素位移来估算光流速度,支持真值模式(直接使用速度数据)和 OpenCV 模式(图像特征点追踪) |
| 共享内存大小 | 1 + 8 + 8 + 1 + 4 + 8 + 1 + 12 = 43 bytes |
otherParams 定义:
| 索引 | 参数 | 说明 |
|---|---|---|
[0] |
maxRange |
最大距地高度测量距离 (米) |
[1] |
OpticalFlowType |
光流计算方式: 0=真值计算, 1=OpenCV |
[2] |
maxCorners |
(仅 OpenCV) 最大角点数量 (默认 50) |
[3] |
qualityLevel |
(仅 OpenCV) 角点质量阈值 (默认 0.3) |
[4] |
minDistance |
(仅 OpenCV) 角点最小间距 (默认 7 pixels) |
输出数据 (OpticalFlowParams):
| 字段 | 说明 |
|---|---|
time_usec |
Unix 时间戳 |
sensor_id |
传感器 ID (= SeqID) |
flow_x / flow_y |
光流速度 (dpix/frame) |
flow_comp_m_x / flow_comp_m_y |
光流速度 (m/s) |
quality |
光流质量 (0–255) |
ground_distance |
距地高度 (米) |
flow_rate_x / flow_rate_y |
角速度补偿 (rad/s) |
Python 输出: 光流数据通过 MAVLink 协议传输,在 vis.imu 相关结构中获取 OpticalFlow 数据。TypeID 设为 10。
ROS: 光流数据不通过 SDK 内置 ROS 话题发布,需用户自行使用 MAVLink ROS 桥接。
Demo 例程: [安装目录]\4.RflySimModel\3.CustExps\e7_ExternalSensors\e3_Opticalflow_UE
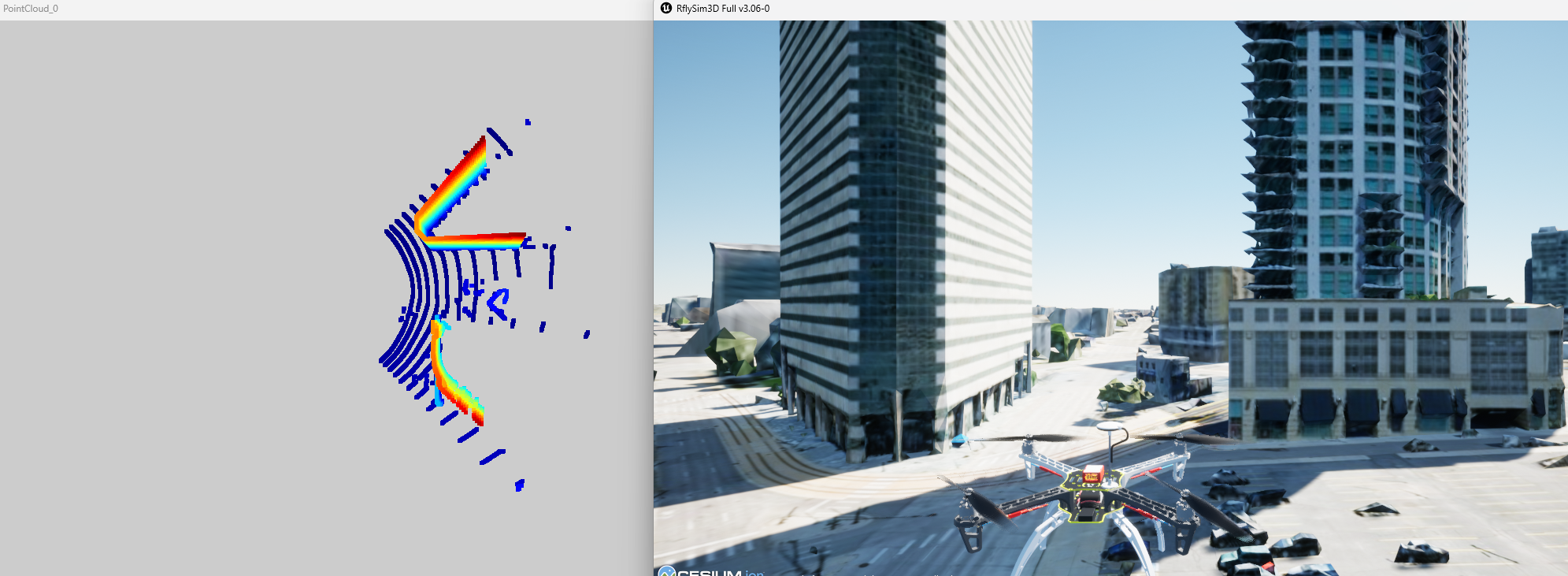
Type 20 — LiDAR(机体坐标系)¶
| 项目 | 说明 |
|---|---|
| 用途 | 射线追踪 LiDAR 仿真,输出机体坐标系下的点云 |
| 获取原理 | 按配置的水平/垂直角度范围和分辨率,并行发射大量射线进行碰撞检测,将命中点坐标转换到传感器机体坐标系,并编码每个点的语义标注 (RGB555) |
| 输出格式 | Int16 编码的 XYZI (每点 4 通道) |
| 坐标系 | 机体坐标系 (传感器本体) |
| 共享内存大小 | 1 + 8 + 9×4 + 2×4×W×H bytes |
otherParams 定义:
| 索引 | 参数 | 说明 |
|---|---|---|
[0] |
distRange |
最大测距距离 (米),默认 200m |
[1] |
distPrec |
距离精度 (保留) |
[2] |
levelLeftAng |
水平扫描左边界角度 (度) |
[3] |
levelRightAng |
水平扫描右边界角度 (度) |
[4] |
horiDownAng |
垂直扫描下边界角度 (度) |
[5] |
horiUpAng |
垂直扫描上边界角度 (度) |
[6] |
GaussNoise0 |
高斯噪声参数 0 (保留) |
[7] |
AxisMask |
坐标系模式 (同 Type 7 的 AxisMask) |
SendProtocol[7] 定义:
| 值 | 含义 |
|---|---|
0 |
仅输出 XYZ(跳过强度通道) |
>0 |
输出 XYZI(第 4 通道为 RGB555 语义颜色) |
扫描范围: DataWidth 列 × DataHeight 行,角度范围由 otherParams[2–5] 定义。
Python 输出: vis.Img[i] → np.ndarray (N×3/4, int16, XYZI 点云),可通过 Open3DShow 模块显示。取图流程同 Type 1。
Config.json 示例¶
{
"VisionSensors": [{
"SeqID": 0,
"TypeID": 20, // LiDAR 机体坐标系
"TargetCopter": 1,
"TargetMountType": 0,
"DataWidth": 900, // 水平扫描 900 列
"DataHeight": 32, // 垂直扫描 32 行
"DataCheckFreq": 10, // 10Hz
"SendProtocol": [0,0,0,0,0,0,0,0],
"CameraFOV": 90,
"EularOrQuat": 0,
"SensorPosXYZ": [0, 0, -0.3], // 安装在载具上方 0.3m
"SensorAngQuat": [0,0,0,0],
"SensorAngEular": [0,0,0],
"otherParams": [200, 0.05, -45, 45, -20, 20, 0, 0, 0,0,0,0,0,0,0,0]
// [0]=最大距离200m [2-5]=水平±45° 垂直-20°~+20°
}]
}
ROS: 点云数据不通过 SDK 内置 ROS 话题发布,需用户自行转换为 sensor_msgs/PointCloud2。
Demo 例程: [安装目录]\8.RflySimVision\0.ApiExps\8.LidarAPIDemo\2.UDPDirectClientServer
Type 21 — LiDAR(世界坐标系)¶
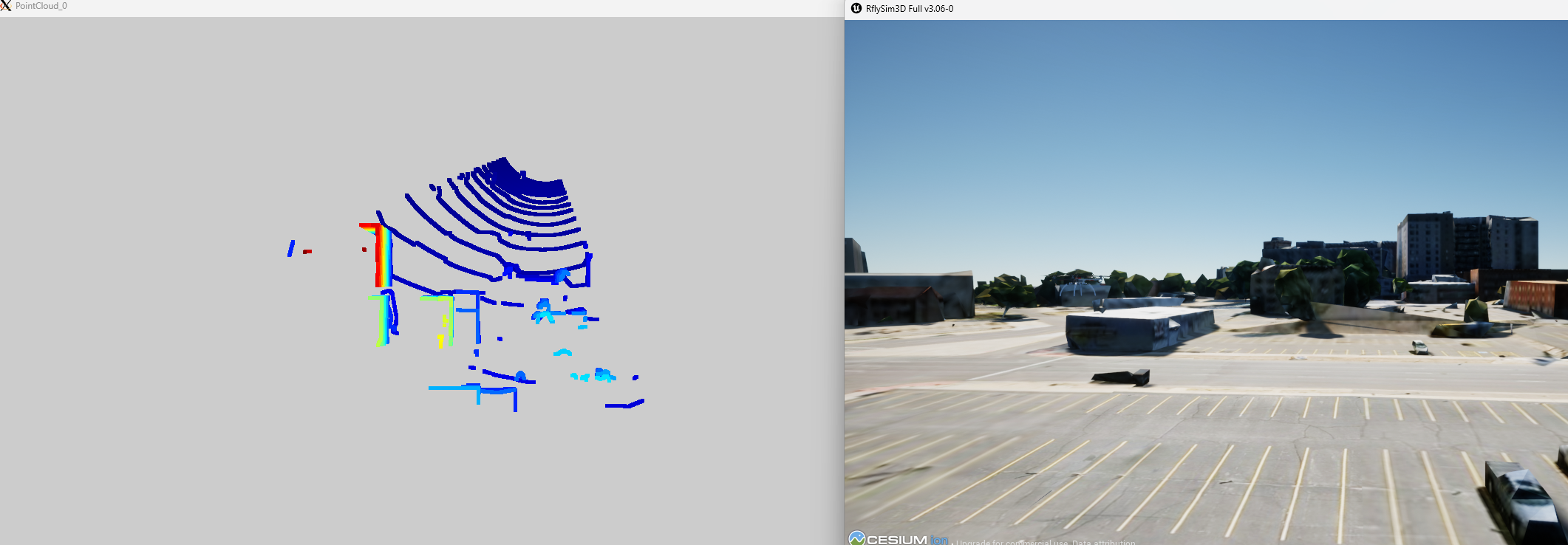
与 Type 20 参数完全一致,唯一区别:
| 项目 | Type 20 | Type 21 |
|---|---|---|
| 输出坐标系 | 机体坐标系 | 世界坐标系 |
Python/ROS 接口同 Type 20,TypeID 改为 21。
Demo 例程: [安装目录]\8.RflySimVision\0.ApiExps\8.LidarAPIDemo\3.UDPDirectClientServerType5
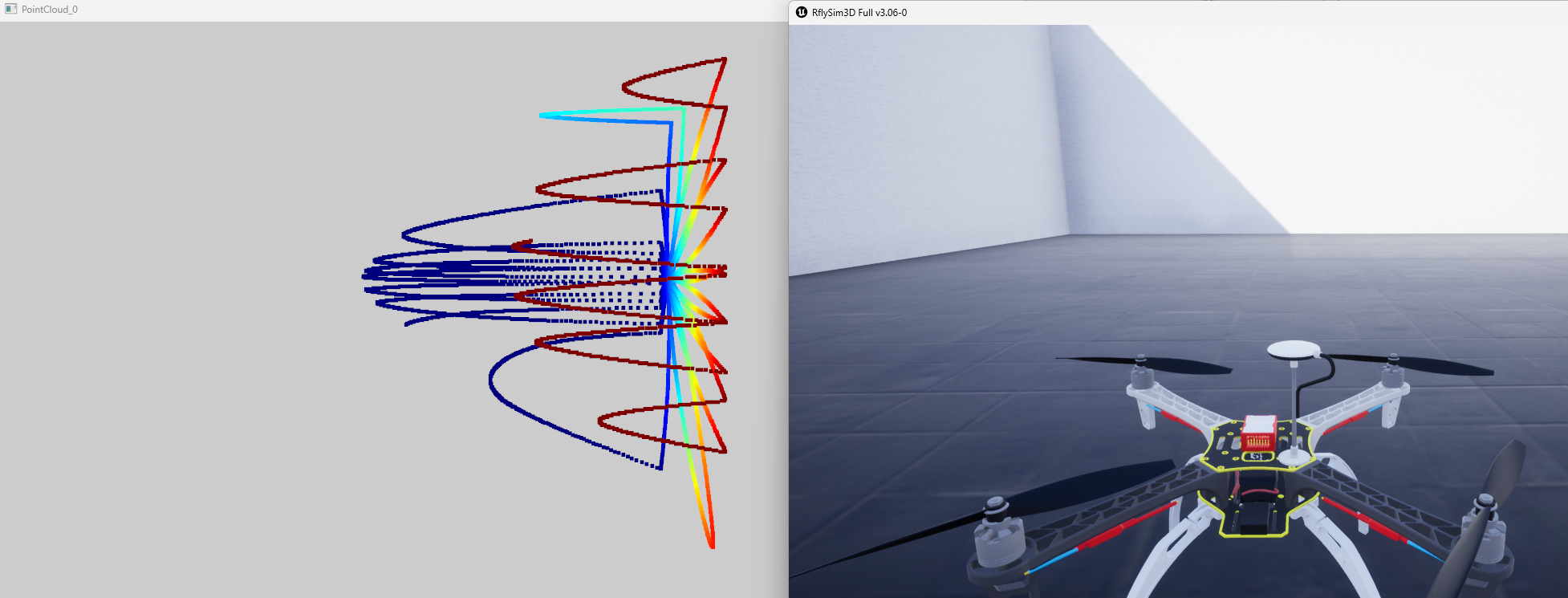
Type 22 — LiDAR(DJI 花瓣扫描)¶
| 项目 | 说明 |
|---|---|
| 用途 | DJI 风格非重复性花瓣扫描 LiDAR |
| 获取原理 | 模拟 DJI Livox 系列的 8 字形花瓣扫描模式,每帧在花瓣路径上发射射线进行碰撞检测,多帧累积后按设定频率批量输出点云 |
| 共享内存大小 | 1 + 8 + 9×4 + 2×4×W×H bytes |
otherParams 定义:
| 索引 | 参数 | 说明 |
|---|---|---|
[0] |
distRange |
最大测距距离 (米),默认 200m |
[1] |
d1 |
圆弧弦高(弧最高点与最低点之差) |
[2] |
xCor |
X 方向修正系数 (默认 1.4) |
[3] |
LeftRadCor |
左弧半径修正系数 (默认 1.18) |
[4] |
EightNum |
8 字形花瓣数量 (默认 1) |
[5] |
FlowerNum |
每朵花瓣中的 8 字形数量 (默认 1) |
[6] |
randAngle |
随着扫描图案增加的随机偏移角度 (度) |
[7] |
AxisMask |
坐标系模式 (同 Type 7 的 AxisMask) |
DataWidth / DataHeight 含义变化:
- DataWidth: 半边花瓣的总点数
- DataHeight: 花瓣行数
- 每帧实际扫描点数 = DataWidth × DataHeight × 3
- CameraFOV 在此类型中用作圆弧弦长计算: 弦长半 = CameraFOV / 4
Python/ROS 接口同 Type 20,TypeID 改为 22。
Demo 例程: [安装目录]\8.RflySimVision\2.AdvExps\e0_AdvApiExps\.7LidarLivoxDemo
Type 23 — LiDAR Mid-360¶
| 项目 | 说明 |
|---|---|
| 用途 | Livox Mid-360 风格 360° 旋转扫描 LiDAR |
| 获取原理 | 模拟 Livox Mid-360 的 16 线旋转扫描模式,每帧发射 17,408 条射线 (16×272×4) 进行碰撞检测,并逐帧旋转扫描角度 |
| 强制分辨率 | DataWidth = 64, DataHeight = 272 (参数修改无效) |
| 每帧射线数 | 16 × 272 × 4 = 17,408 条 |
| 共享内存大小 | 1 + 8 + 4×9 + 2×4×midPointNum bytes |
otherParams 定义:
| 索引 | 参数 | 说明 |
|---|---|---|
[0] |
distRange |
最大测距距离 (米) |
Python/ROS 接口同 Type 20,TypeID 改为 23。
Type 30 — 简易视觉传感器¶

| 项目 | 说明 |
|---|---|
| 用途 | 视锥体内目标检测,输出 2D 边界框 |
| 获取原理 | 通过距离剔除、视域角度剔除和射线可视性检测判断目标是否可见,然后将可见目标的 3D 边界框投影到屏幕空间输出 2D 矩形框 |
| 共享内存大小 | 1 + 8 + 4 + maxTargets × sizeof(SimpleVisionDataStruct) bytes |
otherParams 定义:
| 索引 | 参数 | 说明 |
|---|---|---|
[0] |
maxRange |
最大检测距离 (米) |
[1] |
maxTargets |
最大目标数量 (影响共享内存大小) |
输出 (SimpleVisionDataStruct):
| 字段 | 说明 |
|---|---|
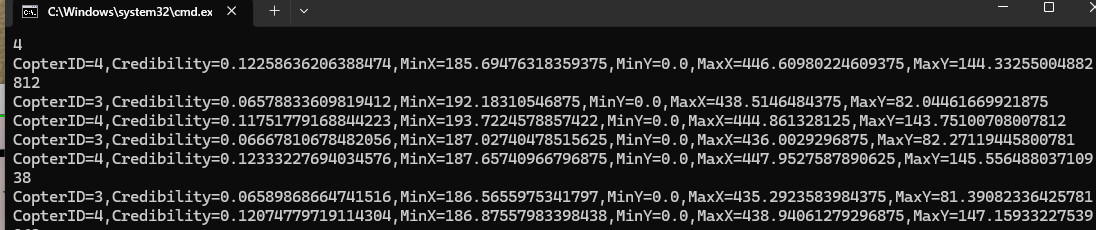
CopterID |
目标飞机 ID |
Credibility |
置信度(边界框面积占比) |
BoxPositionInScreen |
屏幕空间 2D 边界框 (xMin, yMin, xMax, yMax) |
Python 输出: vis.Img[i] → 结构化数据,包含 CopterID、Credibility、BoxPositionInScreen。取图流程同 Type 1,TypeID 改为 30。
ROS: 检测数据不通过 SDK 内置 ROS 话题发布,通过 Python vis.Img[i] 直接访问。
配置前提
Type 30 简易视觉传感器必须和 Type 1 RGB 传感器同时写在同一个 Config.json 的 VisionSensors 数组中。若只配置 Type 30,不同时配置 RGB 传感器,SDK 侧无法拿到简易视觉检测数据。
Demo 例程: [安装目录]\8.RflySimVision\2.AdvExps\e7_ObjDetectYolo\SimpleSensorBaseOnYolo
Type 31 — 简易雷达传感器¶
| 项目 | 说明 |
|---|---|
| 用途 | 全向目标检测,输出目标相对位置 |
| 获取原理 | 检测指定距离范围内的所有目标,通过射线检测验证视线可达性,输出目标在传感器坐标系下的三维相对位置 |
| 共享内存大小 | 1 + 8 + 4 + maxTargets × sizeof(SimpleRadarDataStruct) bytes |
otherParams 定义:
| 索引 | 参数 | 说明 |
|---|---|---|
[0] |
maxRange |
最大检测距离 (米) |
[1] |
maxTargets |
最大目标数量 (影响共享内存大小) |
输出 (SimpleRadarDataStruct):
| 字段 | 说明 |
|---|---|
CopterID |
目标飞机 ID |
RelativePosition |
目标在传感器坐标系下的相对位置 (米) |
与 Type 30 的区别: 无视域角度限制(全向检测),无 2D 投影。
Python 输出: vis.Img[i] → 目标列表,每个元素为 (CopterID, PosX, PosY, PosZ)。PosX/PosY/PosZ 是目标在传感器坐标系下的三维相对位置,单位为米。
ROS: 检测数据不通过 SDK 内置 ROS 话题发布,通过 Python vis.Img[i] 直接访问。
配置前提
Type 31 简易雷达传感器必须和 Type 1 RGB 传感器同时写在同一个 Config.json 的 VisionSensors 数组中。若只配置 Type 31,不同时配置 RGB 传感器,SDK 侧无法拿到简易雷达目标数据。
Config.json 示例¶
下例先创建一个常规 RGB 传感器,再创建绑定在同一架飞机上的简易雷达传感器。Type 31 的输出仍是目标相对位置列表,但配置中应保留标准的 DataWidth、DataHeight、CameraFOV 字段;otherParams[0] 为最大探测距离,otherParams[1] 为最大目标数量。Type 31 推荐使用 UDP 网络传输模式,并为该传感器设置独立端口。
{
"VisionSensors": [
{
"SeqID": 1, // 视觉传感器序号。填 0 时自动递增排序。
"TypeID": 1, // 1: RGB 图像
"TargetCopter": 1, // 传感器绑定的 CopterID,免费版只支持绑定 1 号飞机
"TargetMountType": 0, // 0: 固定飞机几何中心
"DataWidth": 640,
"DataHeight": 480,
"DataCheckFreq": 10,
"SendProtocol": [0, 0, 0, 0, 0, 0, 0, 0],
"CameraFOV": 60,
"EularOrQuat": 0,
"SensorPosXYZ": [0.50, 0, 0.5],
"SensorAngQuat": [0, 0, 0, 0],
"SensorAngEular": [0, 0, 0],
"otherParams": [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
},
{
"SeqID": 2, // 简易雷达传感器序号
"TypeID": 31, // 31: 简易雷达
"TargetCopter": 1,
"TargetMountType": 0,
"DataWidth": 640,
"DataHeight": 480,
"DataCheckFreq": 10,
"SendProtocol": [1, 127, 0, 0, 1, 10001, 0, 0],
"CameraFOV": 60,
"EularOrQuat": 0,
"SensorPosXYZ": [0.50, 0, 0.5],
"SensorAngQuat": [0, 0, 0, 0],
"SensorAngEular": [0, 0, 0],
"otherParams": [200, 100, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
// Type 31(简易雷达): [0]=最大检测距离(m), [1]=最大目标数量
}
]
}
Python 读取例程¶
import time
import VisionCaptureApi
vis = VisionCaptureApi.VisionCaptureApi()
# 1. 加载包含 Type 31 的 Config.json
vis.jsonLoad()
# 2. 向 RflySim3D 发送传感器请求
if not vis.sendReqToUE4():
raise RuntimeError("RflySim3D 未响应传感器请求")
# 3. 开启共享内存/UDP 数据读取线程
vis.startImgCap()
# 4. 找到 Type 31 传感器在 VisSensor/Img 数组中的索引
radar_idx = next(
i for i, sensor in enumerate(vis.VisSensor)
if sensor.TypeID == 31
)
while True:
time.sleep(0.05)
if not vis.hasData[radar_idx]:
continue
# Type 31 输出格式:
# vis.Img[radar_idx] = [
# (CopterID, PosX, PosY, PosZ),
# ...
# ]
# PosX/PosY/PosZ 为目标在传感器坐标系下的相对位置,单位 m。
with vis.Img_lock[radar_idx]:
targets = list(vis.Img[radar_idx])
for copter_id, pos_x, pos_y, pos_z in targets:
distance = (pos_x ** 2 + pos_y ** 2 + pos_z ** 2) ** 0.5
print(
f"CopterID={copter_id}, "
f"RelativePosition=({pos_x:.2f}, {pos_y:.2f}, {pos_z:.2f}) m, "
f"Distance={distance:.2f} m"
)
输出说明
Type 31 是全向相对位置传感器,不做视场角裁剪,也不输出 2D 框。若需要图像视野内的目标框,请使用 Type 30 简易视觉传感器。
Type 40 — 红外灰度图(付费版)¶

| 项目 | 说明 |
|---|---|
| 用途 | 模拟红外成像的灰度图 |
| 获取原理 | 在传感器位置放置虚拟相机,通过红外成像材质将场景渲染为模拟红外辐射的灰度图像 |
| 输出格式 | 单通道灰度 (W×H×1 bytes) |
| DataWidth / DataHeight | 图像分辨率 (像素) |
| CameraFOV | 相机视场角 (度) |
| otherParams | 无专用参数 |
Python 输出: vis.Img[i] → np.ndarray (H×W, uint8, 单通道红外灰度)。取图流程同 Type 1,TypeID 改为 40。
ROS: /rflysim/sensor{SeqID}/img_Infrared_Gray · sensor_msgs/Image · 编码 mono8
Demo 例程: [安装目录]\8.RflySimVision\0.ApiExps\1-UsageAPI\1.ImgSenorAPI\7.InfraredgrayThermalImageDemo
Type 41 — 红外伪彩色图(付费版)¶
| 项目 | 说明 |
|---|---|
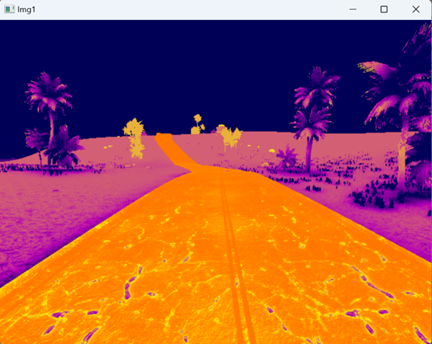
| 用途 | 模拟红外热成像的伪彩色图(热力图) |
| 获取原理 | 在传感器位置放置虚拟相机,通过红外热成像材质将场景温度分布渲染为伪彩色图像,冷区与热区以不同色调呈现 |
| 输出格式 | RGB 彩色图 (W×H×3 bytes) |
| DataWidth / DataHeight | 图像分辨率 (像素) |
| CameraFOV | 相机视场角 (度) |
| otherParams | 无专用参数 |
Python 输出: vis.Img[i] → np.ndarray (H×W×3, uint8, BGR 红外伪彩色图)。取图流程同 Type 1,TypeID 改为 41。
ROS: /rflysim/sensor{SeqID}/img_Infrared · sensor_msgs/Image · 编码 bgr8
Demo 例程: [安装目录]\8.RflySimVision\0.ApiExps\1-UsageAPI\1.ImgSenorAPI\7.InfraredgrayThermalImageDemo
IMU 传感器数据 (来自 CopterSim)¶
IMU 数据并非由 RflySim3D 产生,而是通过 UDP 从 CopterSim 飞控仿真器获取。VisionCaptureApi 提供了统一的请求与接收接口。
数据结构 (imuDataCopter)¶
| 字段 | 类型 | 说明 |
|---|---|---|
checksum |
int |
校验位,固定 1234567898 |
seq |
int |
消息序号 |
timestmp |
double |
仿真时间戳 (秒) |
acc[3] |
float[3] |
三轴加速度 (m/s²),机体坐标系 |
rate[3] |
float[3] |
三轴角速度 (rad/s),机体坐标系 |
C++ 结构体格式:
2i1d6f,总大小 40 bytes。CopterSim 通过 UDP 端口30100 + (copterID-1)*2接收请求,回传到端口31000 + copterID - 1。
Python 请求与读取¶
import VisionCaptureApi
vis = VisionCaptureApi.VisionCaptureApi()
vis.jsonLoad()
vis.sendReqToUE4()
vis.startImgCap()
# 请求 CopterSim 1号飞机的 IMU 数据(默认200Hz)
vis.sendImuReqCopterSim(copterID=1)
# 读取 IMU 数据
while True:
if vis.hasIMUData:
print('时间:', vis.imu.timestmp) # 仿真时间 (秒)
print('加速度:', vis.imu.acc) # [ax, ay, az] m/s²
print('角速度:', vis.imu.rate) # [gx, gy, gz] rad/s
ROS 数据¶
| 话题 | 消息类型 | 说明 |
|---|---|---|
/rflysim/imu |
sensor_msgs/Imu |
加速度 + 角速度,frame_id = "imu" |
ROS 坐标映射 (机体→ROS):
| IMU 字段 | ROS linear_acceleration |
ROS angular_velocity |
|---|---|---|
[0] (x) |
-acc[0] |
rate[0] |
[1] (y) |
acc[1] |
-rate[1] |
[2] (z) |
-acc[2] |
-rate[2] |
ROS2 区分: ROS1 使用
rospy.Duration(imuStmp)设置时间戳;ROS2 使用rclpy.duration.Duration(seconds=imuStmp)并分别赋值stamp.sec和stamp.nanosec。Demo 例程: [安装目录]\RflySimAPIs\8.RflySimVision\0.ApiExps\1-UsageAPI\2.ImuSenorAPI
附录: 传感器类型速查表¶
| TypeID | 名称 | 类别 | 免费版 | 获取方式 | 输出格式 |
|---|---|---|---|---|---|
| 1 | RGB 图像 | 图像 | ✅ | 虚拟相机渲染 | RGB, 3ch |
| 2 | 深度图 | 图像 | ✅ | 虚拟相机深度渲染 | 16-bit, 2ch |
| 3 | 灰度图 | 图像 | ✅ | 虚拟相机渲染 | Gray, 1ch |
| 4 | 分割图 | 图像 | ✅ | 语义标注渲染 | RGB, 3ch |
| 5 | 测距 | 射线 | ✅ | 射线碰撞检测 | float 距离 |
| 6 | 声音 | 音频 | ❌ | 场景环境音捕获 | 音频串流 |
| 7 | 深度点云 | 点云 | ❌ | 深度图反投影 | XYZ[I], 3/4ch |
| 8 | 鱼眼 | 图像 | ✅ | 全景相机 + 鱼眼投影 | RGB, 3ch |
| 9 | 吊舱 | 图像 | ❌ | 可控吊舱相机 | RGB, 3ch |
| 10 | 光流 | 传感器 | ✅ | 射线+图像帧间对比 | MAVLink 光流 |
| 20 | LiDAR (机体) | 点云 | ✅ | 多射线并行碰撞检测 | XYZI, 4ch |
| 21 | LiDAR (世界) | 点云 | ✅ | 多射线并行碰撞检测 | XYZI, 4ch |
| 22 | LiDAR (DJI) | 点云 | ✅ | 花瓣扫描碰撞检测 | XYZI, 4ch |
| 23 | Mid-360 | 点云 | ✅ | 旋转扫描碰撞检测 | XYZI, 4ch |
| 30 | 简易视觉 | 检测 | ✅ | 视锥剔除 + 射线检测 | 2D BBox |
| 31 | 简易雷达 | 检测 | ✅ | 距离剔除 + 射线检测 | 3D 相对位置 |
| 40 | 红外灰度 | 图像 | ❌ | 红外成像材质渲染 | Gray, 1ch |
| 41 | 红外伪彩色 | 图像 | ❌ | 红外热成像渲染 | RGB, 3ch |