平台三维资源索引¶
RflySim3D/RflySimUE5 内置丰富的三维模型与场景资源。在 RflySim3D 中按 F2 键可生成完整的模型样式索引表 ModelData.csv。
Unique3DClassID 计算公式:
Unique3DClassID = DisplayOrder × 100000 + ClassID
一、免费版资源¶
1.1 免费版三维模型¶
四旋翼 (ClassID=3)¶

F450_Default
100000003

Droneyee_QuadX330
101000003

Droneyee_QuadX200
101100003

DJI_Phantom_White
102000003

DJI_Phantom_Red
103000003

DJI_Phantom_Army
104000003

AR_Drone_BlackGreen
105000003

AR_Drone_Blue
106000003

AR_Drone_Army
107000003

Quad_Fold_Gray
108000003

Quad_Fold_Army
109000003
人物 (ClassID=30)¶
Dennis_Static
100000030

Mei_Static
101000030

Nathan_Static
102000030

Nathan_Walking
103000030
Nathan_Dancing
104000030
Nathan_Standing
105000030

Carla_Static
105500030

Carla_Walking
106000030
Carla_Standing
107000030

Claudia_Static
107500030
Claudia_Walking
108000030
Claudia_Standing
109000030
Eric_Static
109500030

Eric_Walking
110000030
Eric_Standing
111000030

Manuel_Static
111500030
Manuel_Walking
112000030
Manuel_Standing
113000030

Sophia_Static
113500030
Sophia_Walking
114000030

Sophia_Standing
115000030
标定板 (ClassID=40)¶
CheckerBoard
100000040
CirclePattern
100100040
地面车 (ClassID=50)¶

Standard_Car_Blue
100000050
发光体 (ClassID=60)¶
Light_White
100000060
Light_Red
101000060

Light_Green
102000060

Light_Blue
103000060

Light_Purple
104000060

Light_Yellow
105000060

Light_Aqua
106000060

Light_White_Strong
107000060
Light_Red_Strong
108000060
Light_Green_Strong
109000060
Light_Blue_Strong
110000060

Light_Purple_Strong
111000060

Light_Yellow_Strong
112000060
Light_Aqua_Strong
113000060
Light_Dark
114000060
固定翼 (ClassID=100)¶
Flying_Wing
100000100

Fixed_Wing
110000100
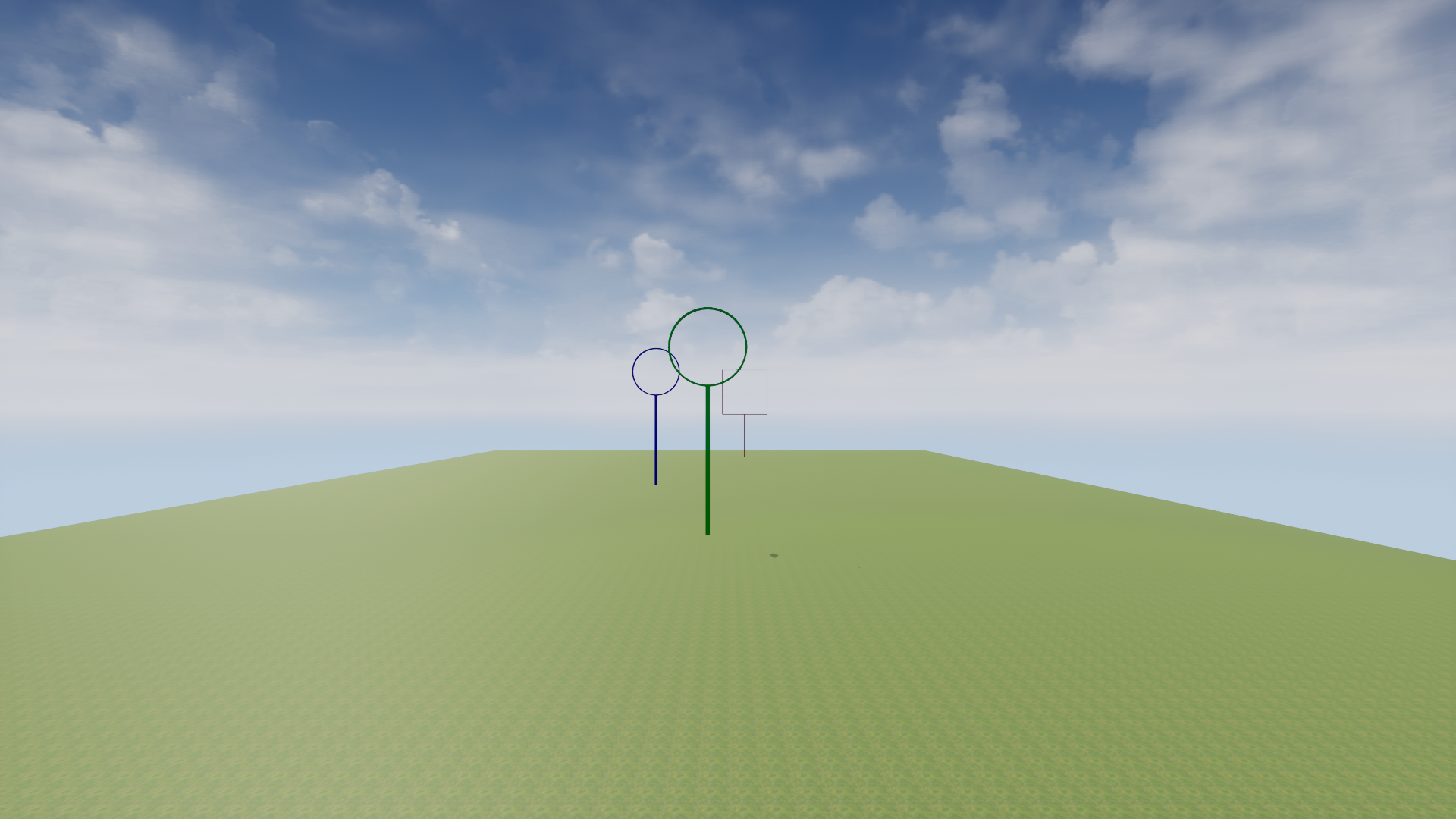
圆形环 (ClassID=150)¶

Ring_Target_Blue
100000150

Ring_Target_Green
101000150
方形环 (ClassID=151)¶

Quad_Target_Red
100000151

Quad_Target_Green
101000151

Quad_Target_Blue
102000151
球形 (ClassID=152)¶

Sphere_Target_Red
100000152
1.2 免费版三维场景¶

3DDisplay
CameraRoom
ChallengeMap
Changsha
Denver

EarthMap
Grasslands
LightShow
LowGPU

MapData
MapDataHongkong
MapSmall

MatchScene
MatchScene2

MountainTerrain
MountainTerrain_Water

MoutainRoad
NeighborhoodPark

OldFactory
SLAMScene
VisionRing
VisionRingBlank
WhiteMap
二、完整版及以上资源¶
以下资源仅在完整版及以上版本中可用。
2.1 完整版三维模型¶
四旋翼 (ClassID=3)¶
F450_Default
10000000337-37-29cm(静态网格)
Droneyee_QuadX330
10100000353-50-21cm(静态网格)
Droneyee_QuadX200
10110000329-29-11cm(静态网格)
DJI_Phantom_White
10200000329-28-16cm(静态网格)
DJI_Phantom_Red
10300000329-28-16cm(静态网格)
DJI_Phantom_Army
10400000329-28-16cm(静态网格)
AR_Drone_BlackGreen
10500000351-51-11cm(静态网格)
AR_Drone_Blue
10600000351-51-11cm(静态网格)
AR_Drone_Army
10700000351-51-11cm(静态网格)
Quad_Fold_Gray
10800000335-34-12cm(静态网格)
Quad_Fold_Army
10900000335-34-12cm(静态网格)
六旋翼 (ClassID=5)¶

HexaCopter_550
1000000548-55-39cm(静态网格)
八旋翼 (ClassID=8)¶

Octocopter
10000008133-134-77cm(静态网格)
X8共轴 (ClassID=10)¶

X8_OCTO
1000001056-56-25(静态网格)
人物 (ClassID=30)¶
Dennis_Static
100000030239-70-268cm(骨骼动画)
Mei_Static
101000030239-70-268cm(骨骼动画)
Nathan_Static
102000030239-70-268cm(骨骼动画)
Nathan_Walking
103000030239-70-268cm(骨骼动画)
Nathan_Dancing
104000030239-70-268cm(骨骼动画)
Nathan_Standing
105000030239-70-268cm(骨骼动画)
Carla_Static
105500030239-70-268cm(骨骼动画)
Carla_Walking
106000030239-70-268cm(骨骼动画)
Carla_Standing
107000030239-70-268cm(骨骼动画)
Claudia_Static
107500030239-70-268cm(骨骼动画)
Claudia_Walking
108000030239-70-268cm(骨骼动画)
Claudia_Standing
109000030239-70-268cm(骨骼动画)
Eric_Static
109500030239-70-268cm(骨骼动画)
Eric_Walking
110000030239-70-268cm(骨骼动画)
Eric_Standing
111000030239-70-268cm(骨骼动画)
Manuel_Static
111500030239-70-268cm(骨骼动画)
Manuel_Walking
112000030239-70-268cm(骨骼动画)
Manuel_Standing
113000030239-70-268cm(骨骼动画)
Sophia_Static
113500030239-70-268cm(骨骼动画)
Sophia_Walking
114000030239-70-268cm(骨骼动画)
Sophia_Standing
115000030239-70-268cm(骨骼动画)
标定板 (ClassID=40)¶
CheckerBoard
100000040标定板60cm_84cm_60mm
CirclePattern
100100040标定板60cm_84cm_60mm
地面车 (ClassID=50)¶
Standard_Car_Blue
100000050272-118-62cm(静态网格)

Car_GreenBlack
10100050502-226-171cm(静态网格)

Car_Red
10200050502-226-171cm(静态网格)

Car_White
10300050502-226-171cm(静态网格)
工程车 (ClassID=51)¶

Roller8
10900051静态网格

Roller9
11800051静态网格

paver
11900051静态网格

Trunk
12500051静态网格
发光体 (ClassID=60)¶
Light_White
100000060自发光材质
Light_Red
101000060自发光材质
Light_Green
102000060自发光材质
Light_Blue
103000060自发光材质
Light_Purple
104000060自发光材质
Light_Yellow
105000060自发光材质
Light_Aqua
106000060自发光材质
Light_White_Strong
107000060自发光材质
Light_Red_Strong
108000060自发光材质
Light_Green_Strong
109000060自发光材质
Light_Blue_Strong
110000060自发光材质
Light_Purple_Strong
111000060自发光材质
Light_Yellow_Strong
112000060自发光材质
Light_Aqua_Strong
113000060自发光材质
Light_Dark
114000060自发光材质
固定翼 (ClassID=100)¶
Flying_Wing
10000010075-167-18cm(静态网格)
Fixed_Wing
110000100750-1464-240cm(静态网格)
圆形环 (ClassID=150)¶
Ring_Target_Blue
10000015050-959-2763cm(静态网格)
Ring_Target_Green
10100015050-959-2763cm(静态网格)
方形环 (ClassID=151)¶
Quad_Target_Red
10000015150-2050-4025cm(静态网格)
Quad_Target_Green
10100015150-2050-4025cm(静态网格)
Quad_Target_Blue
10200015150-2050-4025cm(静态网格)
球形 (ClassID=152)¶
Sphere_Target_Red
100000152100-100-100cm(静态网格)
飞翼 (ClassID=201)¶

FSV900
1000020145-89-22cm(静态网格)
轰炸机 (ClassID=208)¶

EastBomberSU24
100002082398-1682-620cm(动画蓝图)
直升机 (ClassID=229)¶

Helicopter1
10000229198-1178-334cm(动画蓝图)
固定翼-UltraStick (ClassID=234)¶

UltraStick25E
10000234134-152-39cm(动画蓝图)
尾座式 (ClassID=243)¶

Tailsitter
1000024343-101-50cm(动画蓝图)
J150 (ClassID=251)¶

FSJ150
1000025131-21-21cm(动画蓝图)
FS310 (ClassID=310)¶

FS310
100031054-57-30cm(动画蓝图)
潜艇 (ClassID=600)¶

Submarine2
10000600(1766-2399-1521)0.1cm(动画蓝图)
标准VTOL (ClassID=602)¶

StandardVtol2
10000602143-249-32cm(动画蓝图)
通信特效 (ClassID=802)¶
虚拟管道 (ClassID=803)¶
靶标 (ClassID=809)¶
2.2 完整版三维场景¶
3DDisplay
CameraRoom
ChallengeMap
Changsha
Denver
DesertTown
EarthMap
Grasslands
LightShow
LowGPU
MapData
MapDataHongkong
MapSmall
MatchScene
MatchScene2
MountainTerrain
MountainTerrain_Water
MoutainRoad
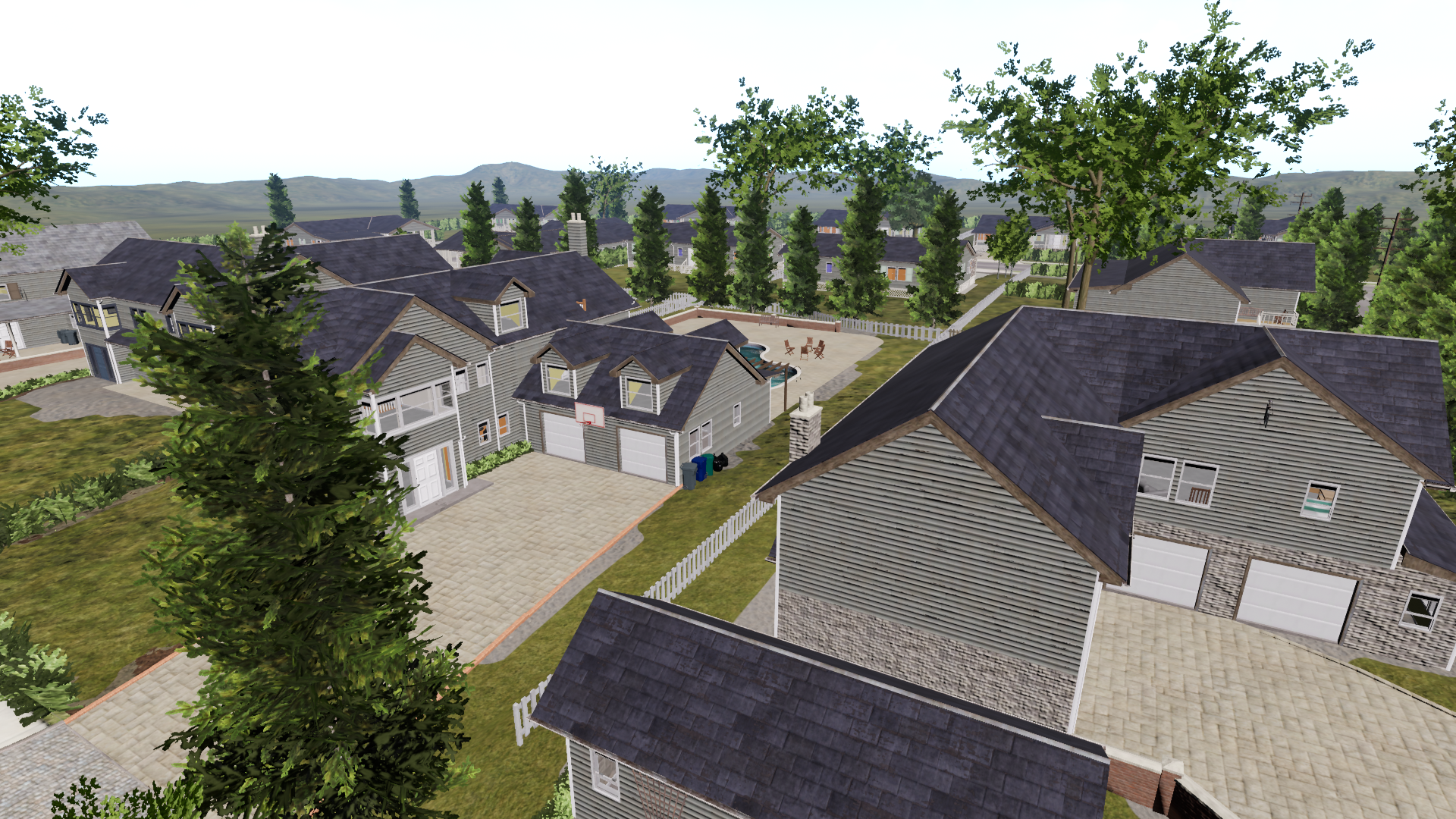
NeighborhoodPark
OldFactory
SLAMScene
VisionRing
VisionRingBlank
WhiteMap
三、自定义场景导入¶
RflySim3D场景所需文件¶
RflySim3D中完整的仿真场景需要两部分信息
1.场景文件(”****.umap”)¶
需要将烘焙完成后“【UE项目主文件夹】\Saved\Cooked\WindowsNoEditor\【工程名】\Content”目录下的场景文件拷贝到【安装目录】\RflySim3D\RflySim3D\Content目录下。
注意:
烘焙完拷贝出来后不能再修改得到文件和文件夹的名字,也不能在\RflySim3D\Content目录下新建文件夹。重命名只能在UE编辑器中进行。
每个”****.umap”(烘焙前后有区别)地图文件对应了一个独立的三维场景,RflySim3D/RflySimUE5会自动扫描PX4PSP\RflySim3D\RflySim3D\Content目录下所有的.umap。
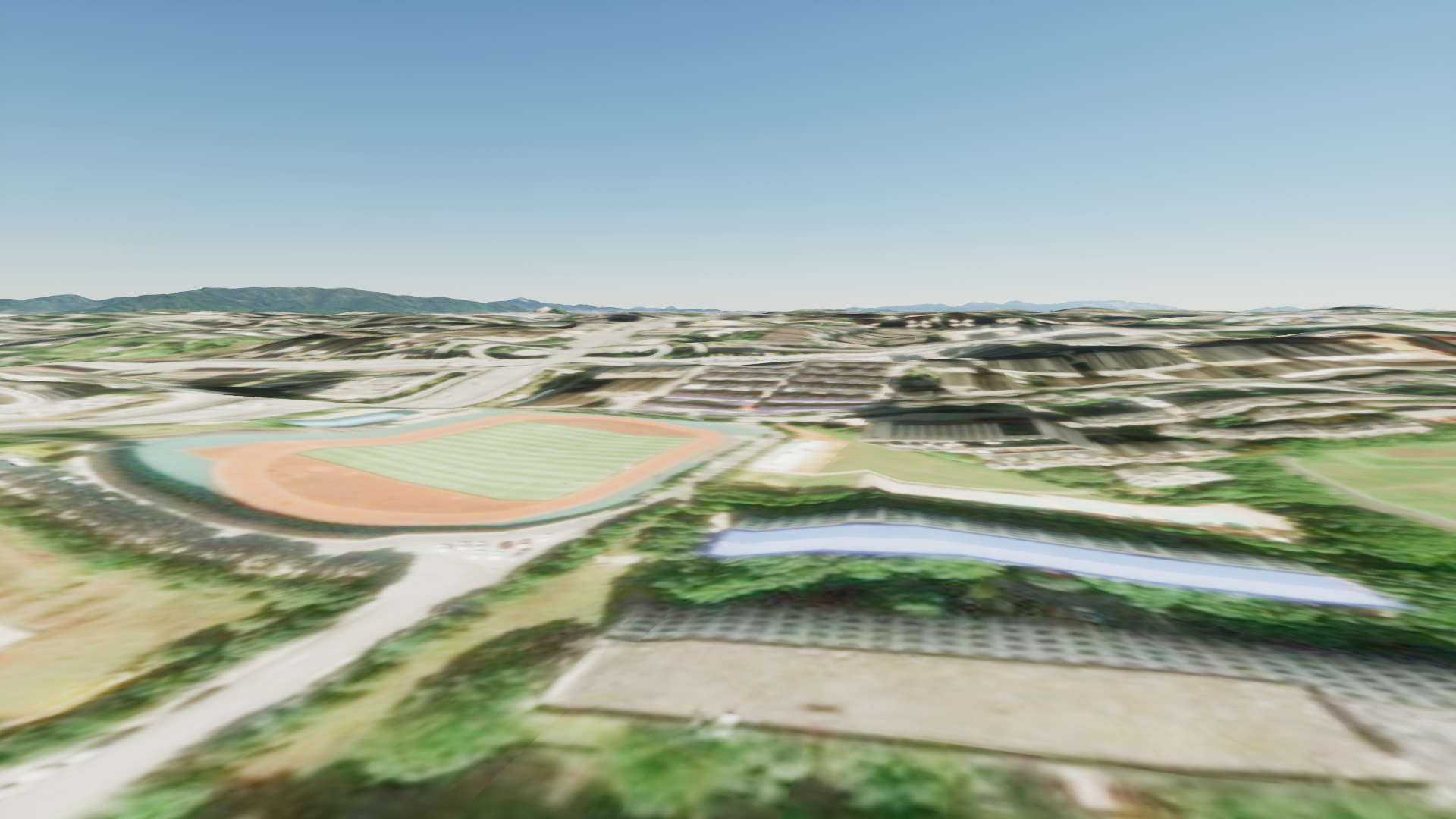
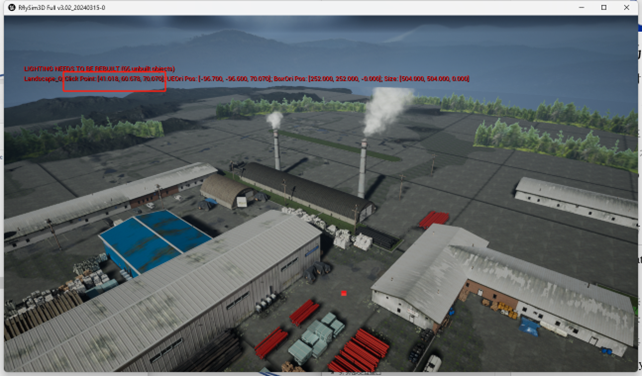
场景中水平面以下部分的高度不能超过50m(这是由CopterSim中的dll模型初始点参考海拔设置的,由*init.m文件中的ModelParam_envAlitude参数指定),为了确保场景最低点在水平面上方,应该将场景中最低点设为场景参考点。下面以OldFactory场景为例说明这一过程:
先将场景导入RflySim3D,在RflySim3D中目测该场景最低点,双击读取该点高程信息,这里说明该场景最低点在水平面下方70m处。
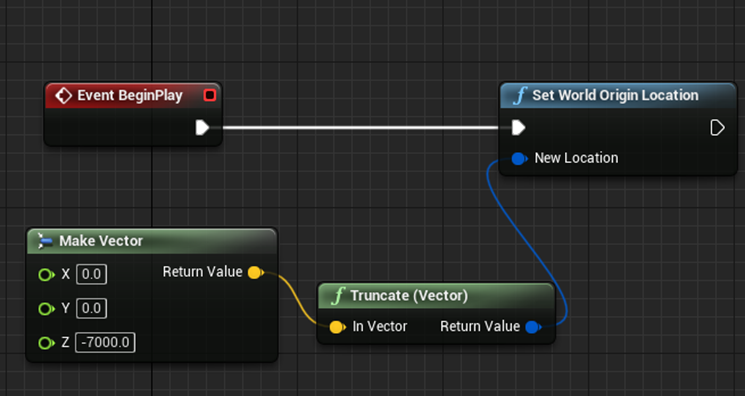
因此在UE中打开该场景的关卡蓝图,如下将场景最低点(水平面下方7000cm处)设为参考点,相当于把场景整体上移70m,保存关卡蓝图,重新把场景打包导入RflySim3D。
2.地形高程信息(“****.png”)¶
场景导入前,在UE编辑器中观测并记录场景的大致范围(单位为厘米);烘焙场景并导入RflySim3D后,在RflySim3D中利用比”*.umap”场景地形略大的范围(单位为米)使用RflyScanTerrainH(扫描地形)命令,这将在PX4PSP\RflySim3D目录找到对应“.png”和“***.txt”文件,分别存入了该场景的高程信息和地形校准及范围。将这两个文件拷贝到PX4PSP\CopterSim\external\map中即可完成导入。
注意:
png地形文件实际上是以图片形式存储的二维矩阵,包含了场景的高程图。以png格式存储矩阵能够很好的实现高程矩阵的压缩,便于节省空间。
png的高程文件并不包含坐标原点、缩放尺度、场景范围等信息,因此需要一个校正文件,RflySim平台采用txt格式输入9维数组或12维数组(多出经纬高地理基准信息)传入校正信息。
3.地形校准数据(“****.txt”)¶
平台中txt校正文件存储的是右上角三维坐标点(xy全为正,z向上为正)、左下角三维坐标点(xy全为负,z向上为正)、第3点三维坐标点,单位均为厘米。前两个点的目的是为了确认地形的范围和中心坐标,第3点坐标可自行选取,理论上需要尽量在高度上与前两个点有落差,用于校正高度尺度。
除此之外,当在RflySim3D中使用cesium全球大场景(仅个人高级版以上)时,在txt中,还可以上述9维数据之后输入三维GPS地形数据,按纬度、经度、高度顺序加入,可配置QGroundControl中对应的显示基准坐标。