5分钟快速上手¶
安装完成后,只需几步即可跑通您的第一个仿真实验!本页提供 SITL(纯软件)和 HITL(带硬件)两种路径。
推荐路径
绝大多数用户应从 SITL 仿真开始,无需任何额外硬件。
SITL 仿真(纯软件)¶

步骤 1:启动仿真¶
- 进入桌面
RflyTools文件夹,双击SITLRun快捷方式 - 在弹出的 CMD 命令窗口中输入
1→ 回车(表示启动 1 架四旋翼) - 等待系统自动启动1个CopterSim、1个QGroundControl、1个RflySim3D软件,并可在RflySim3D软件中看到已经生成的四旋翼无人机。

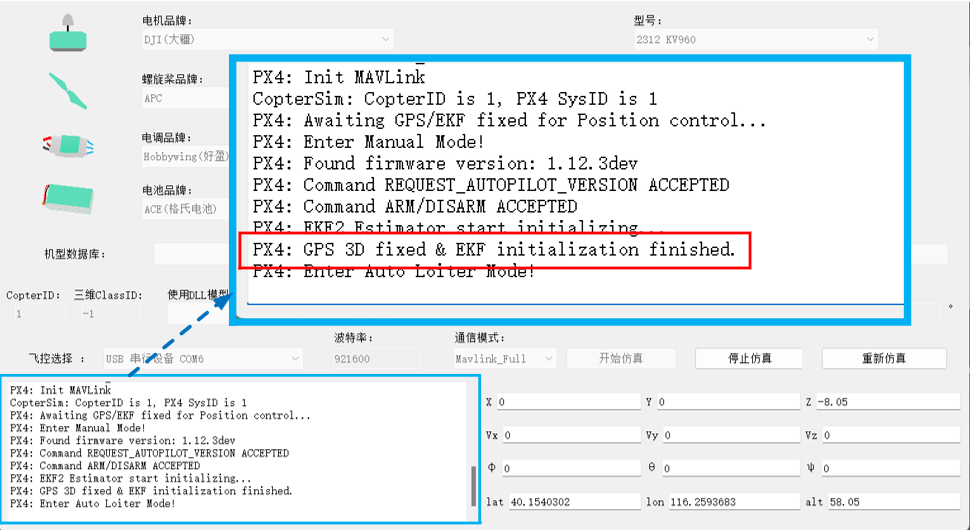
步骤 2:等待初始化¶
等待CopterSim软件下侧日志栏必须打印出 GPS 3D fixed & EKF initialization finished,或者观察 RflySim3D 窗口左上角,当显示 *** EKF 3DFixed 时,表示自驾仪的状态估计器已完成初始化,定位锁定成功。
常见问题
如果等待超过 30 秒仍未出现 3DFixed,请检查:
- 杀毒软件是否已完全关闭
- 是否有网络代理或端口转发程序干扰 UDP 通信
- 计算机配置是否满足最低要求
步骤 3:控制起飞¶
- 在 QGroundControl 地面站中,确认当前模式为「保持」(Hold)模式
- 点击左上角「起飞」(Takeoff)按钮
- 拖动滑块确认起飞
步骤 4:观察效果¶
如果 RflySim3D 中的四旋翼能平稳起飞并悬停,说明工具链配置无误,且您已经实现了对RflySim的初步入门。
成功!
恭喜您完成了第一次 SITL 仿真!您可以在 QGroundControl 中继续尝试:
- 设置航点任务自动飞行
- 切换飞行模式(如 Position / Mission / Return)
- 观察实时遥测数据
步骤 5:结束仿真¶
在 CMD 命令窗口中按任意键,系统将自动关闭所有关联程序。
HITL 仿真(带硬件)¶
前提条件
- 一块兼容 PX4 的 Pixhawk 自驾仪(推荐 Pixhawk 6X)
- 请提前参考实验:[RflySim安装路径]/RflySimAPIs/1.RflySimIntro/2.AdvExps/e2.FCUIntro/Readme.pdf,配置飞控到HIL仿真状态。
- 已通过 USB 数据线连接至主机
- 自驾仪已刷入 PX4 固件(可使用 QGC 刷入)
步骤 1:连接硬件¶
- 使用 USB 数据线将 Pixhawk 连接到电脑
- 听到 Pixhawk 启动音后,在 设备管理器 中确认 COM 口号
步骤 2:启动仿真¶
- 进入桌面
RflyTools文件夹,双击HITLRun快捷方式 - 在弹出的 CMD 窗口中输入对应的 COM 口号(如
COM3),回车 - 等待 CopterSim → RflySim3D → QGC 依次启动
步骤 3:起飞测试¶
操作与 SITL 模式相同:
- 等待CopterSim软件下侧日志栏必须打印出
GPS 3D fixed & EKF initialization finished,或者观察 RflySim3D 窗口左上角,当显示*** EKF 3DFixed,表示自驾仪的状态估计器已完成初始化。 - 在 QGC 中进行与SIL相同的起飞操作即可
- 观察四旋翼是否平稳起飞
低性能电脑启动
如果您的计算机显卡性能不足,导致仿真时飞行器产生抖动,可以尝试使用低精度三维场景模式,双击 RflyTools\SITLRunLowGPU 或 RflyTools\HITLRunLowGPU 启动。
下一步¶
安装验证通过后,您可以: