Offboard_full 模块文档¶
所属工具箱:RflySim Swarm
简介¶
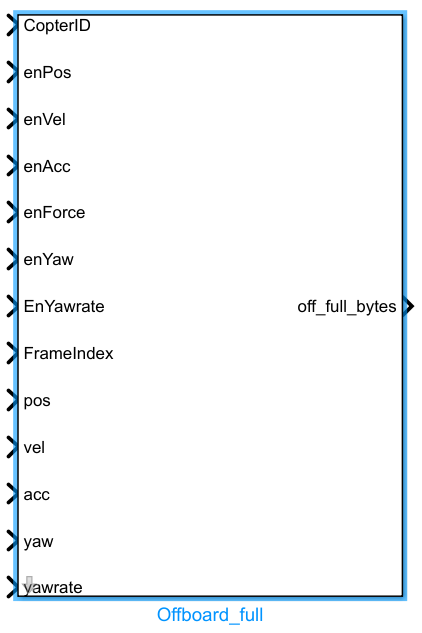
一句话描述:该模块用于将多无人机 Offboard 控制的各类控制指令、参数编码生成符合MAVLink协议的字节消息,支持PX4的Offboard模式全类型控制需求。
该模块是RflySim Swarm集群开发工具链中的Offboard控制指令编码节点,面向多无人机集群Offboard控制仿真开发场景设计,可同时支持位置、速度、加速度、力、航向角、航向角速度多种控制量的组合控制,用户可灵活启用对应控制维度、选择控制参考坐标系。
模块生成的MAVLink格式控制指令字节流,可通过UDP通信接口传输给CopterSim或多台PX4无人机飞控,实现集群的Offboard控制,同时配合RflySim3D可以完成集群控制算法的可视化仿真验证,支持从仿真到实机的快速迁移。
端口说明¶
输入端口(Inputs)¶
| 端口名 | 数据类型 | 维度 | 说明 |
|---|---|---|---|
CopterID |
uint8 |
1×1 |
无人机的唯一标识符,用于区分多无人机集群中的不同无人机 |
enPos |
boolean |
1×1 |
位置控制模式启用标志 |
enVel |
boolean |
1×1 |
速度控制模式启用标志 |
enAcc |
boolean |
1×1 |
加速度控制模式启用标志 |
enForce |
boolean |
1×1 |
力控制模式启用标志 |
enYaw |
boolean |
1×1 |
航向角控制模式启用标志 |
enYawrate |
boolean |
1×1 |
航向角速度控制模式启用标志 |
FrameIndex |
uint8 |
1×1 |
控制信号参考坐标系索引,可选例如MAV_FRAME_LOCAL_NED、MAV_FRAME_BODY_FRD |
Pos |
double |
1×3 |
位置控制量 |
Vel |
double |
1×3 |
速度控制量 |
Acc |
double |
1×3 |
加速度控制量 |
Force |
double |
1×3 |
力控制量 |
Yaw |
double |
1×1 |
航向角控制量 [待确认] |
Yawrate |
double |
1×1 |
航向角速度控制量 [待确认] |
输出端口(Outputs)¶
| 端口名 | 数据类型 | 维度 | 说明 |
|---|---|---|---|
Offboard_bytes |
double |
1×8 |
编码生成的包含控制命令的MAVLink消息字节数组 |
参数配置(Parameters)¶
本模块无可配参数。
模块特性(Block Characteristics)¶
| 特性项 | 值 |
|---|---|
| 支持的数据类型 | double、single、uint8、boolean |
| 直接馈通(Direct Feedthrough) | 是 |
| 采样时间 | 继承 |
| 代码生成支持 | 否 |
数据通信协议¶
本模块仅完成Offboard控制命令的MAVLink消息编码,输出编码后的字节数组,不直接进行网络通信传输。
相关模块¶
| 模块名 | 说明 |
|---|---|
SetPositionGlobalYaw_SW |
生成群体无人机全局坐标系下带航向的位置控制指令 |
SetVelocityBodyYawrate_SW |
生成群体无人机机体坐标系下带航向角速度的速度控制指令 |
UAVSendMAVData_UDP |
将编码后的MAVLink消息通过UDP发送给仿真或实机飞控 |
Offboard_decode |
对接收的Offboard控制MAVLink消息进行解码解析 |
注意事项与常见问题¶
- 初始化顺序:该模块仅用于生成MAVLink格式的offboard控制指令,使用前需确保群组通信初始化模块已完成配置,且所有无人机的CopterID不重复,否则会出现指令发送错误、无人机识别冲突问题。
- 坐标系索引合法性:FrameIndex必须输入PX4 MAVLink协议定义的合法枚举值,输入未定义的枚举值会导致飞控无法识别控制指令参考坐标系,造成无人机控制偏差或失控。
- 控制使能逻辑:offboard控制模式下至少需要启用一个控制量(位置/速度/加速度/力/航向角/航向角速度中至少一个使能端设为true),全不使能时飞控不会响应控制指令。
- 字节数据格式匹配:输出的Offboard_bytes为8位double型字节数组,需对应连接兼容RflySim Swarm群组通信格式的发送模块,不要直接连接非匹配接口,否则会出现数据解析错误。
- 采样时间匹配:模块输出的MAVLink控制指令需要和飞控offboard控制的刷新频率匹配,建议设置模块采样时间和飞控控制周期一致(通常为10ms~50ms),过慢的采样频率会导致offboard模式断开,过快会造成不必要的通信带宽占用。
更新日志¶
v4.00(2024-12-10): 初始版本发布,支持生成完整Offboard控制模式的MAVLink消息字节包,支持多无人机ID区分、多控制模式组合配置、自定义参考坐标系选择。