工具链概述¶
RflySim 是什么?¶
RflySim(Reliable Flyght Simulation,可靠飞行仿真)是由北京卓翼智能飞思实验室联合中南大学戴训华团队与北京航空航天大学全权团队共同打造的专业、免费、开放的智能无人集群系统自动化设计与开发工具链。该工具链提供涵盖无人系统从算法开发、硬件在环仿真,直至真机部署实验的全流程自动化解决方案,致力于满足无人智能体控制、集群规划与视觉导航等领域的各类开发与测试需求。
核心设计理念
RflySim 深度贯彻基于模型的设计(Model-Based Design, MBD)理念。它将系统的设计、建模、仿真与验证等流程集成于统一的平台(如 MATLAB/Simulink)之中,并广泛融合 Python、ROS/ROS2、Unreal Engine 等主流开源与商用生态,实现了“底层稳定控制 + 上层感知决策”的全栈协同开发闭环。
工具链版本层级¶
RflySim 工具链不仅面向广大开发者提供了免费的基础版本,也为更复杂的高质量企业级或军工测试需求提供了进阶方案。目前分为三大版本层级:
| 版本名称 | 主要功能及包含内容 | 适用场景与对象 | 获取方式 |
|---|---|---|---|
| 免费版 | 包含单机 SITL/HITL 仿真核心、Python/ROS 开发接口、配套教程课程等基础仿真验证功能。 | 高校教学、个人学习、初级算法开发验证 | 官网直接下载 ISO 安装包。 |
| 完整版 | 包括多机分布式与集群仿真、UE5 高逼真渲染支持、复杂环境适配、最新 PX4 固件及集群盒子硬件对接等。 | 科研院所、无人系统协同与集群项目验证 | 定向发布,请联系官方售后团队。 |
| 定制版 | 针对特色项目的接口定制、第三方自驾仪/航电黑盒接入、高等级安全测试(FPGA仿真等)及专项培训服务。 | 企业研发、军工应用、高等级安全标准测试认证 | 签署需求合同进行深度定制开发。 |
版本差异详情
关于更细致的功能包含范围与技术支持差异可直接访问 🔎版本对比详情🔎 ,完整版及以上版本请直接通过邮件(service@rflysim.com)联系飞思实验室团队获取。
配套教具购买¶
为帮助开发者打通“仿真驱动硬件”的最后一公里,我们提供了丰富的全套周边硬件:

飞思实验室官方淘宝店铺已正式上线!我们会定期上架围绕无人系统开发配套的软、硬件产品或教具,目前已推出的核心商品包括:硬件在环仿真套装(涵盖自驾仪、载板及周边信号链路设备)、飞思 MiniQuad150 无人机开发平台、飞思无人系统载具动态模型包、无人系统可视化显示资产包(丰富的UE场景及特效资源等)。👉 店铺直达链接:https://rflysim.taobao.com/

开发背景与平台优势¶
当前无人机与无人系统正向集群化、自主化与智能化大步迈进。但在从实验室走向复杂真实应用环境的途中,传统的纯软件仿真与飞行器物理测试间往往存在巨大“鸿沟”:一方面,部分常规仿真软件因算力或真实性不足,难以为高阶视觉算法与集群对抗提供可信环境;另一方面,直接真机测试不仅效率低下,还会带来极高的安全与毁损风险。
在此背景下,RflySim 工具链应运而生。其具备如下核心平台优势:
- 无缝衔接的 Sim2Real(仿真到真机)过渡:用户无需精通嵌入式 C/C++,可直接利用 MATLAB/Simulink 生成 C/C++ 飞行控制代码并一键部署,实现硬件在环验证至真机试飞的零切换。
- 全栈开发的极高包容度:无需掌握大量软硬件底层通讯原理。通过标准化的 TCP/UDP/串口协议及易用的 Python/ROS API,即可快速实现感知控制、强化学习与多机协同等上层算法接入。
- 高逼真三维环境与视觉仿真:依托底层的虚幻引擎(Unreal Engine),精准渲染阴影、光线、遮挡及碰撞反馈,生成可用于深度学习的高质量训练数据。
整体架构与核心组件¶
RflySim 工具链是一套紧密协作的复杂系统,由几大核心模块形成仿真的完整闭环。
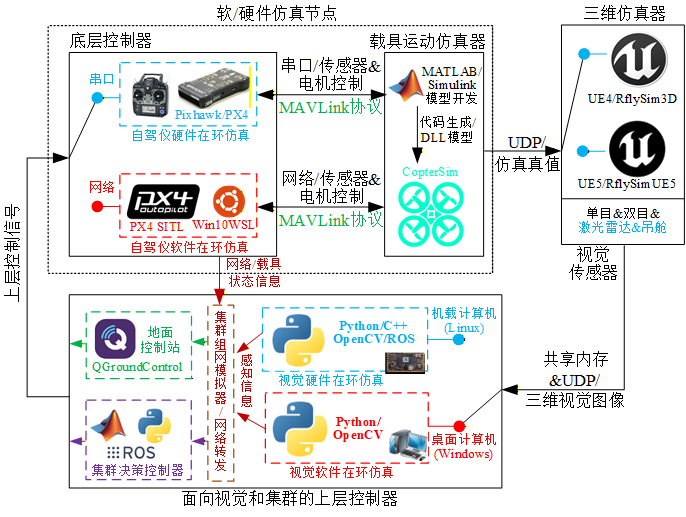
核心功能组件概览¶
| 模块类别 | 核心组件 / 支持软件 | 主要承载功能 |
|---|---|---|
| 载具运动仿真器 | CopterSim (及拓展 DLL) | 执行高精度的载具(多旋翼、固定翼、车辆等)六自由度刚体动力学解算,与物理碰撞模拟。 |
| 底层控制器 | PX4 (SITL/HITL), Pixhawk 硬件 | 负责传感器数据融合、姿态/位置环控制、模式管理并产生底层激励信号(如电机 PWM)。 |
| 三维仿真器 | RflySim3D / RflySimUE5 | 处理大规模三维环境的高保真物理级渲染,为模拟载具生成相机、激光雷达等各类传感器数据馈送。 |
| 上层控制器 | Python, ROS 1/2, C++ | 处理计算机视觉识别、复杂路径规划、多机协同(集群编队)与强化学习训练等上层高级决策。 |
| 自动化集成工具 | SimCreate, VisCreate, BAT 脚本集 | 实现一键部署、环境初始化、自定义三维场景打包、以及无人机集群一键起飞等流程的自动化衔接。 |
三大核心仿真模式对比¶
根据开发阶段与验证对象的不同,RflySim 提供了从纯软件层到半实物层、再到系统黑盒层的全面仿真模式支持:
| 对比维度 | 软件在环仿真 (SITL) | 硬件在环仿真 (HITL) | 进阶:FPGA 高保真在环仿真 |
|---|---|---|---|
| 核心特点 | 所有控制器代码均运行于电脑主机内(如 WSL/Docker 中) | 控制器实际运行于真实的飞控硬件(如 Pixhawk)板带中 | 利用 FPGA 重构底层传感器信号接口,彻底实现信号级仿真 |
| 对物理硬件依赖 | ❌ 完全不需要(仅需 PC) | ✅ 需要 Pixhawk 飞控主板及串口连线 | ✅ 需要 FPGA 开发板 + 任何第三方自驾仪 |
| 仿真时钟与实时性 | 中等,受限于 PC 系统调度资源 | 高,以飞控硬件真实时钟为准 | 极高,纳秒/微秒级硬实时响应 |
| 适用开发阶段 | 算法设计初期、快速迭代与集群逻辑验证阶段 | 联调部署阶段、针对硬件性能瓶颈与稳定性的验证阶段 | 军方或工业级认证、针对第三方全黑盒系统的边界安全性测试阶段 |
使用建议
- 新手或集群算法开发者:推荐使用 SITL,无需购买和配置任何硬件设备即可用一台电脑跑通 80% 以上的代码与逻辑。
- 系统集成与固件开发者:在上层软件成熟后,接入 Pixhawk 硬件使用 HITL,以排查因总线带宽、中断延迟等引起的真实硬件问题。
典型开发流程全景¶
基于 RflySim,可以将无人系统的开发工作流依据难度与职责细分为两条典型路径:
1. 底层控制算法与安全测试开发流程¶
- 依托 MATLAB/Simulink,设计多旋翼或固定翼等载具的姿态与位置控制器。
- 利用 MBD(基于模型设计)一键生成 C/C++ 形式的 PX4 固件。
- 将控制器分别进行 SIL 和 HIL 测试,并搭配内建的故障注入系统(如电机失效、GPS丢失模拟)进行安全冗余测试。
- 完成软硬件联调后,将成熟固件直接烧录至真实载具,开展户外试飞。

2. 故障注入与自动测试开发流程¶
故障注入测试的目的在于验证系统设计、软件实现及硬件架构中所提出的安全机制和容错策略的有效性,具体包括系统的响应时间、诊断覆盖率,以及各类安全机制在异常情况下的完整性与正确性。 针对不同开发环节与测试环境,故障注入的方式和重点也不尽相同。以基于 RflySim工具链的底层控制系统开发为例,其完整流程通常包括五个阶段:建模阶段、控制器设计阶段、软件仿真阶段、硬件仿真阶段,以及真机实验测试阶段。上述各阶段分别对应从软件单元验证、嵌入式软硬件验证、软硬件协同集成验证,直至整机集成测试的不同开发深度。RflySim 工具链全面支持在各阶段实施故障注入测试,构建覆盖全生命周期的安全评估与验证体系。

3. 感知决策与集群控制算法开发流程¶
在实际的无人集群系统中,每个无人载具需独立完成智能感知与自主决策,并通过网络通信实现状态信息与感知结果的共享,最终形成具有分布式特性的集群协同感知与控制体系。对这类带感知决策的集群系统进行仿真,不仅需要为每架载具实时生成视觉、点云等多模态传感器数据,还需在三维渲染和网络通信方面处理多个载具的大量数据,这带来了极大的系统负载挑战。RflySim 采用分布式仿真架构,能够有效支持上述复杂任务,具备良好的扩展性与实时性。
对于一套完整的分布式智能集群协同系统而言,在完成单机的稳定、可靠控制后,开发工作主要集中在感知决策与集群协同两大类算法上。在实际开发过程中,通常需要将这两类算法解耦开来,以便实现整体的并行开发与测试。此外,直接进行多机协同实验通常风险较大,需要通过虚实结合仿真技术,逐步向真机集群迁移。最终完整开发与测试流程通常经历以下六个阶段,涵盖从算法验证、系统集成到复杂环境下的真机部署,逐步实现系统从仿真到实际应用的过渡。

无论你是熟悉 MATLAB 控制理论的科研人员,还是专注 C++/ROS 激光雷达导航的机器人工程师,亦或是偏好 Python/PyTorch 视觉追踪与强化学习的算法开发者,都能在 RflySim 工具链中找到对症的接口。这种极高的包容度与生态穿透力,是该工具链能够实现“一处开发,全栈打通”的根本保障。