Tool chain long-term support flight control introduction
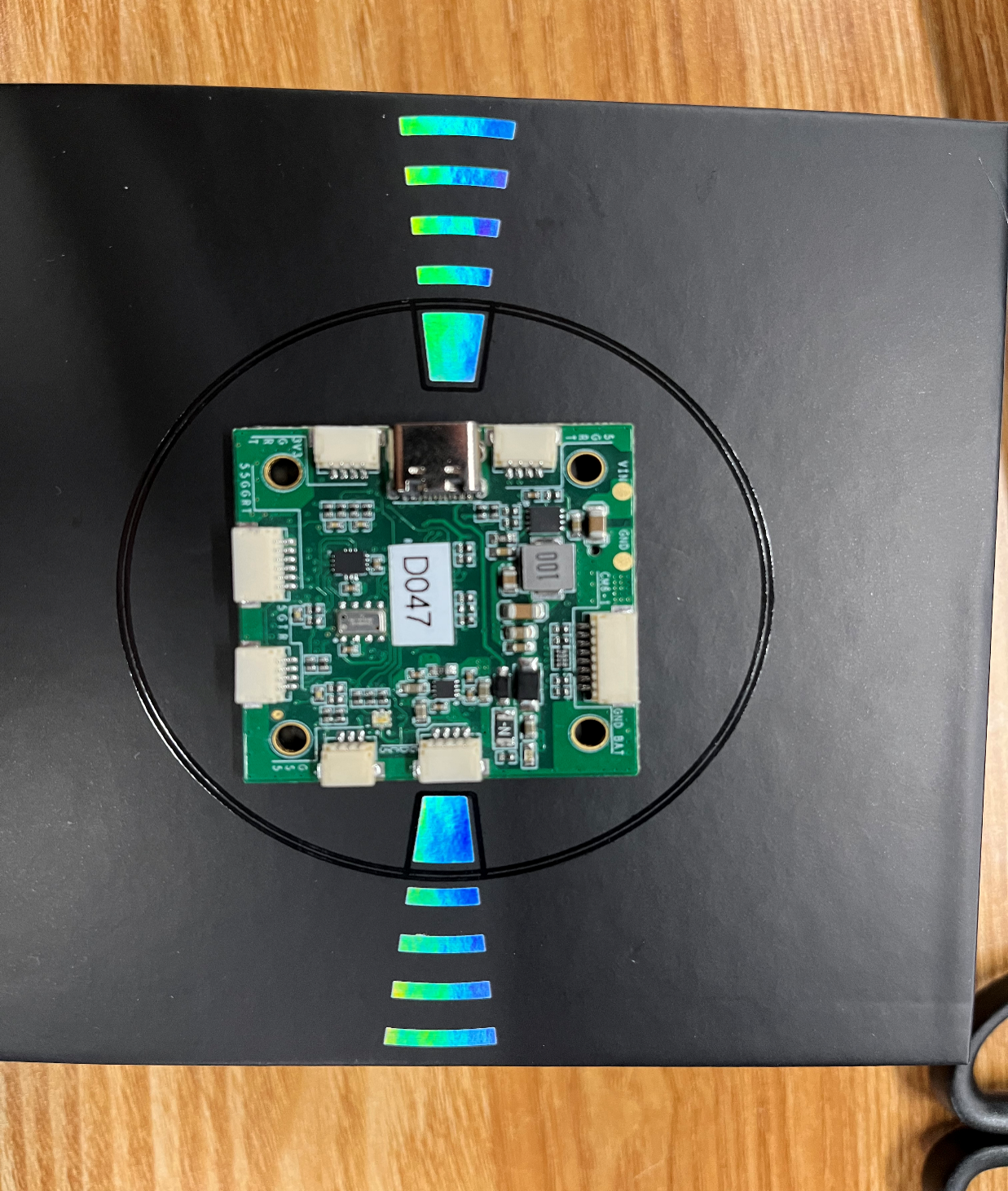
1.ZY_Racer
racer Flight Control is a UAV flight controller developed by Beijing Zhuoyi Intelligent Technology Co., LTD based on PX4 open source flight control architecture. It has the characteristics of high reliability, strong performance and stable operation. Integrated three-axis gyroscope, three-axis accelerometer, barometer and other sensors, support SD card flight record, open source code support secondary development. Support four rotor, fixed wing, vertical landing UAV, unmanned vehicle, unmanned ship and other unmanned platforms. Internal integrated power module, can be directly from the battery power supply, reduce the connection, greatly improve the flight reliability.
2.RflySim configuration
If the flight control hardware (firmware droneyee_zyfc-h7_default) is used, the following figure is recommended for installation and configuration.
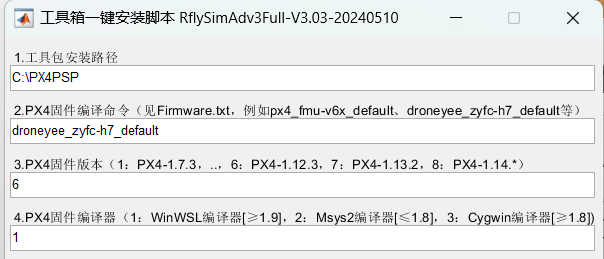
Run the droneyee_zyfc -H7_default compile command
Use 6: PX4 1.12.3 version firmware
Use 1: WinWSL compiler
3.Official firmware restore
Open the QGC ground station and enter the following screen.
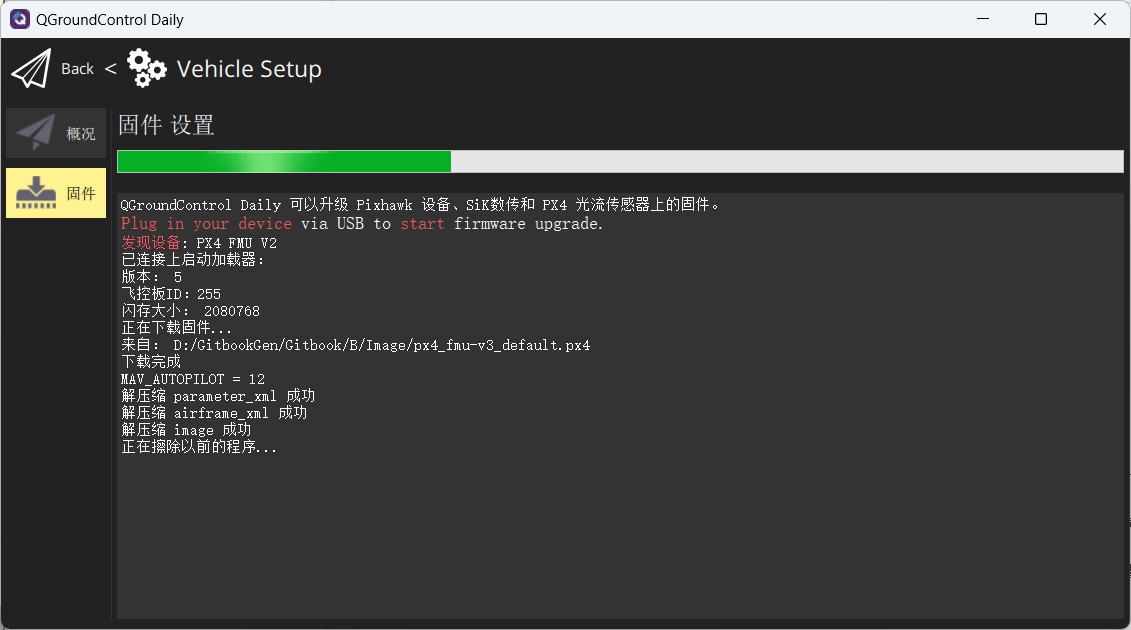
Link the flight control to the computer, make the following selection in the pop-up interface, select burn firmware
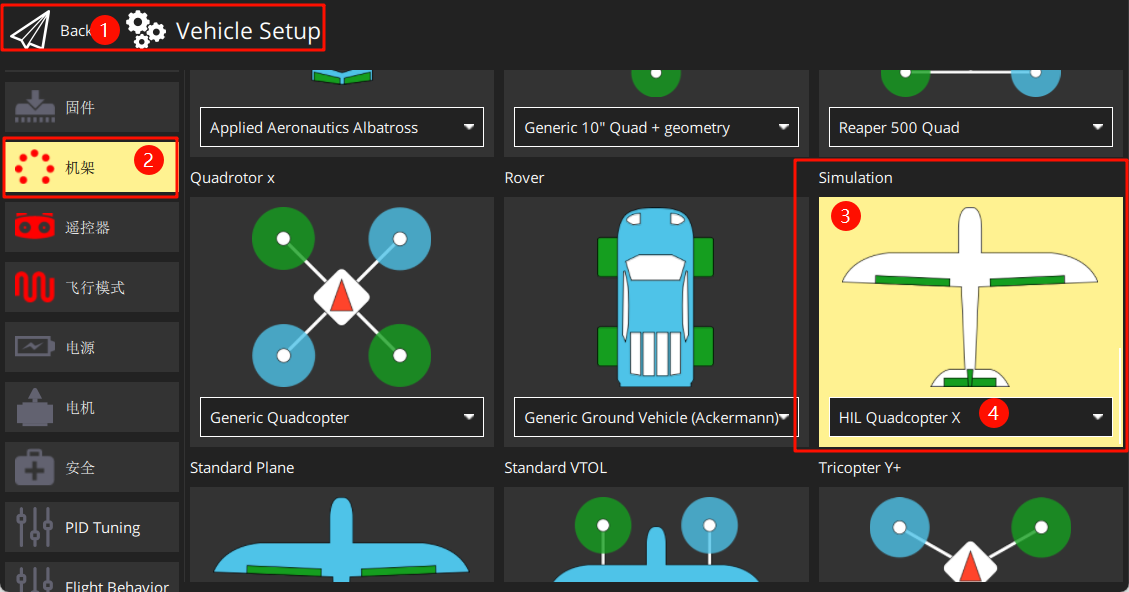
Set the rack to HIL Quadcopter X, swipe to the top and click "Apply and Restart" and wait for the restart to complete.

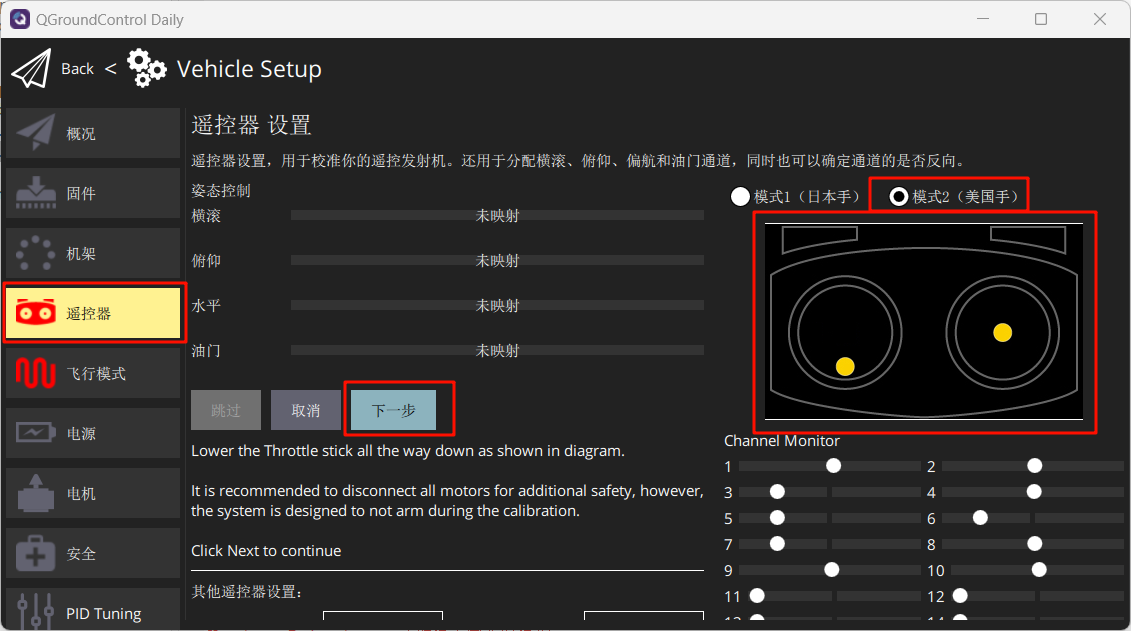
Link the remote receiver (note the line sequence) and turn on the remote. Calibrate the remote control as shown.
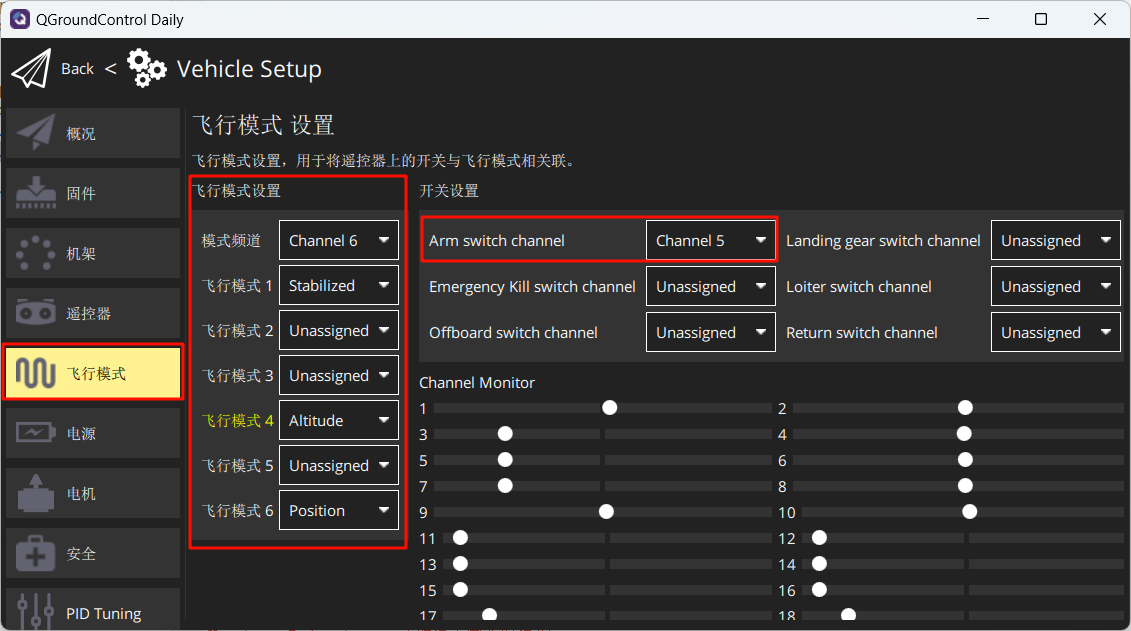
Set flight mode as shown below.
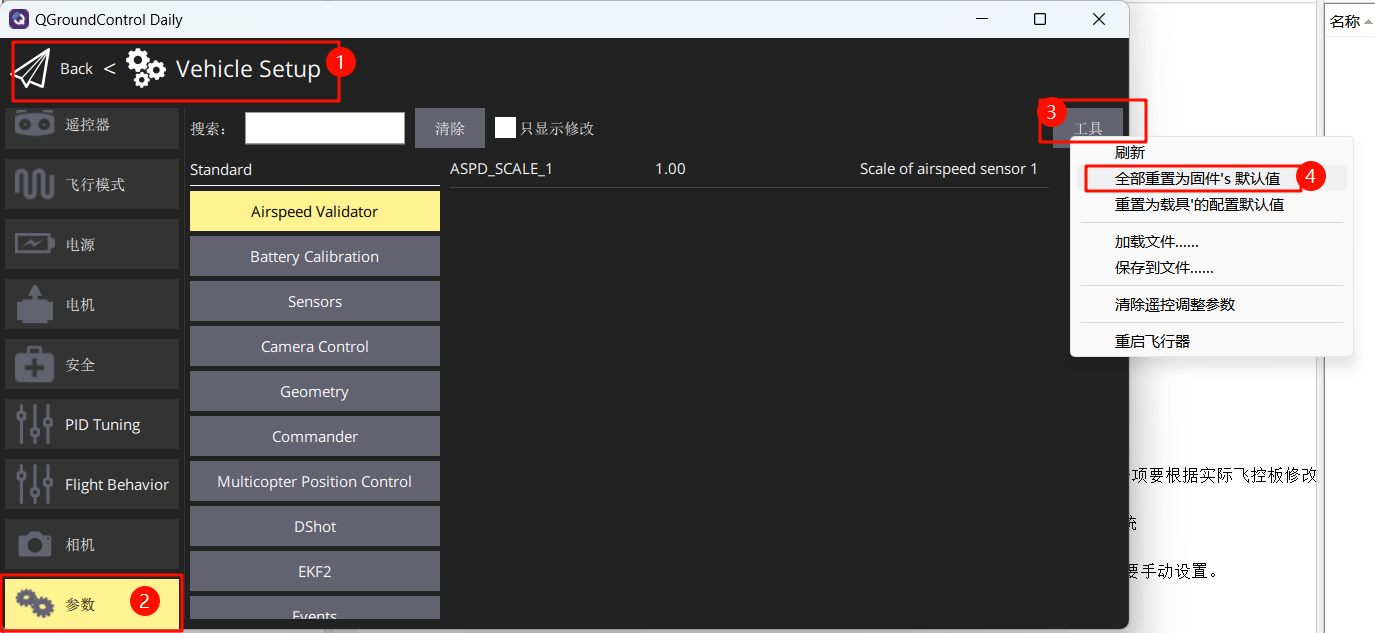
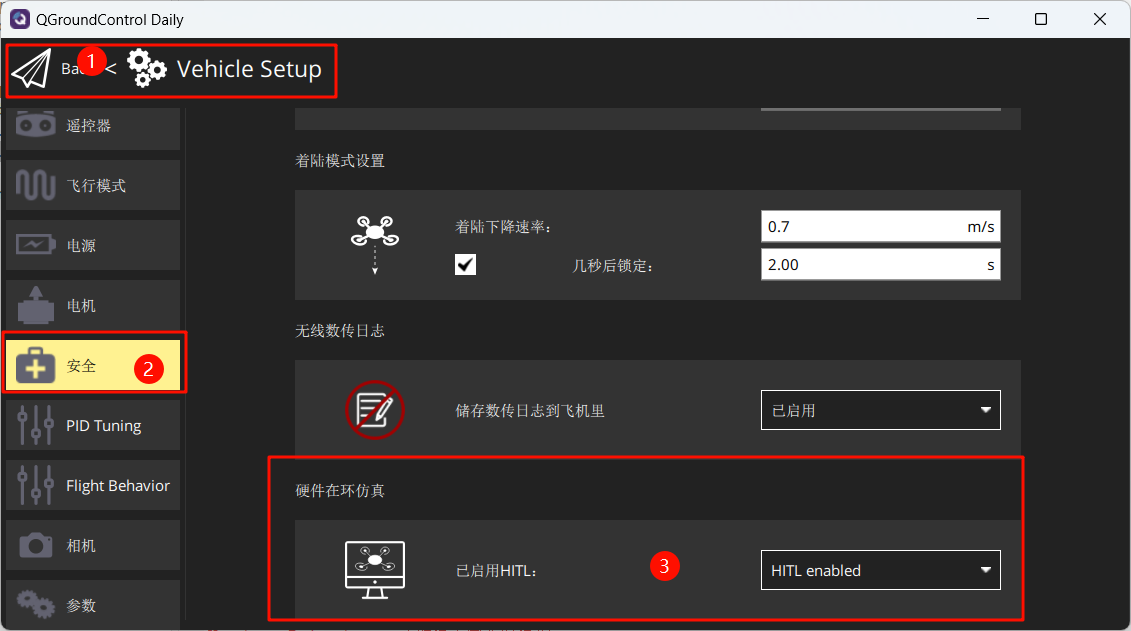
In security Settings, only hardware-in-the-loop emulation is enabled.
4.Start hardware-in-the-loop (HIL) emulation
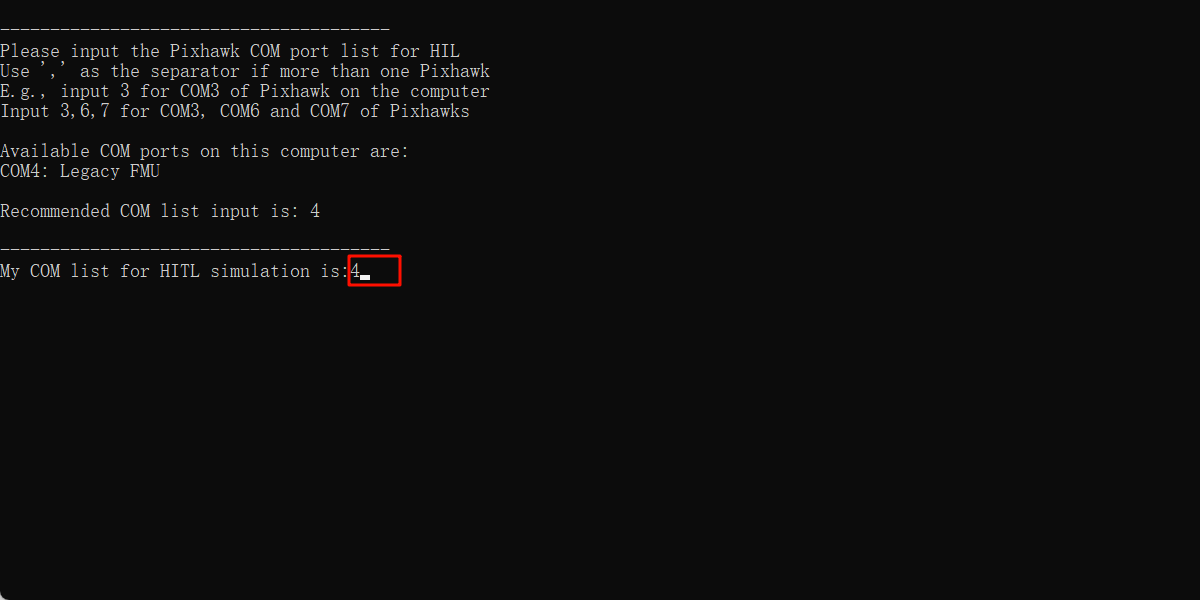
Once the above setup is complete, close QGC. Run the "[installation directory]\ desktop \RflyTools\HITLRun.lnk" script in administrator mode
Enter the flight control port number (for example, 4) in the cmd dialog box.
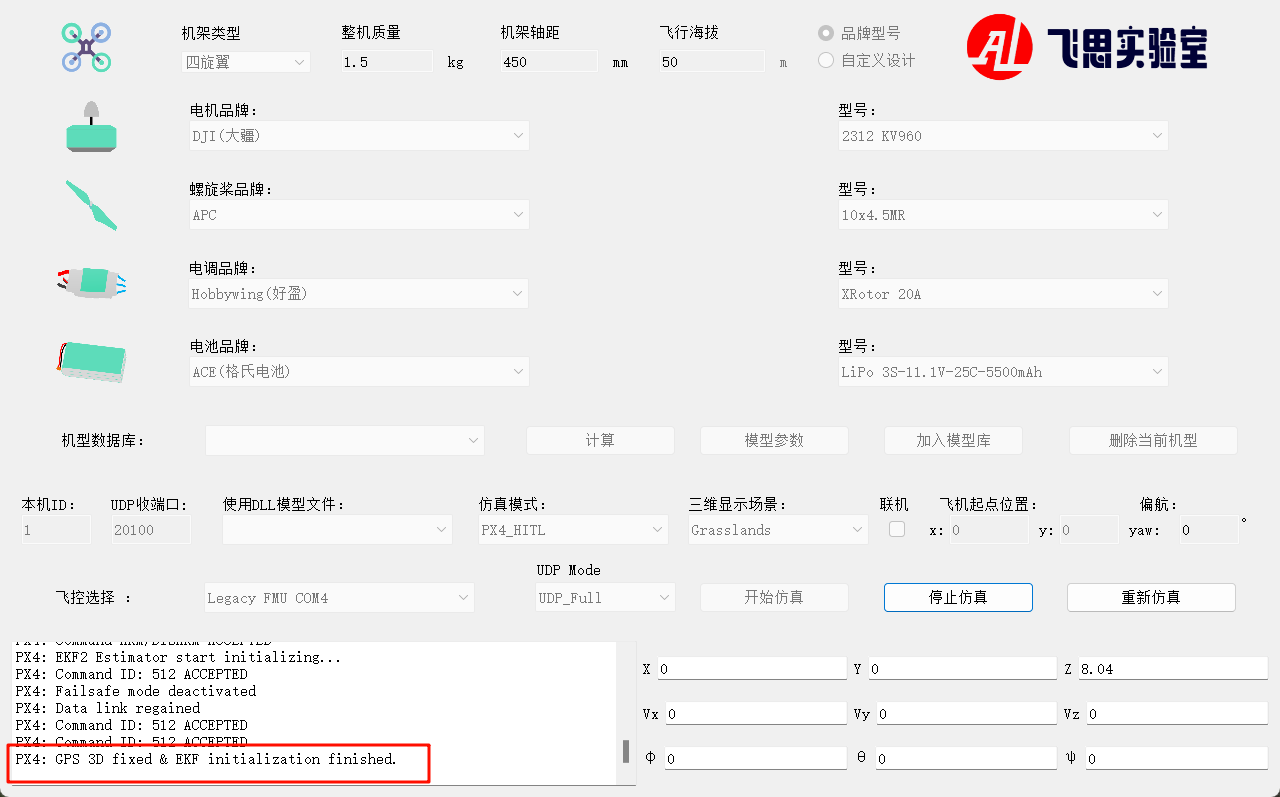
Wait for the bottom left corner of CopterSim to display: 'PX4: GPS 3D fixed & EKF initialization finished.'

Unlock the CH5 channel in the remote control to take off and control the flight of the aircraft.