9.1 How to Use This Chapter
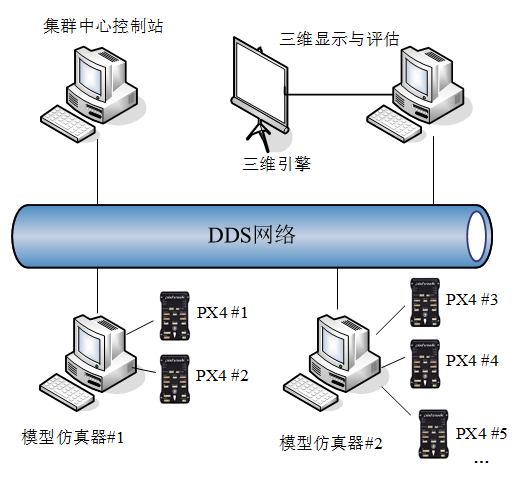
RflySim employs a distributed network architecture, enabling diverse simulation models to run seamlessly on either the same machine or across multiple computers. By launching multiple model simulators and integrating numerous Pixhawk/PX4 autopilot hardware units, it creates an expansive multi-UAV swarm simulation environment. Since a single computer's processing capacity is inherently limited, RflySim extends this capacity through inter-computer communication within a Local Area Network (LAN), significantly increasing the total number of aircraft supported in the simulation.
Chapter Introduction Document
The introduction document for this chapter is located at: 🔗[Installation Directory]\RflySimAPIs\9.RflySimComm\Intro.pdf🔗
API Reference
The development API reference for this chapter is located at: 🔗[Installation Directory]\RflySimAPIs\9.RflySimComm\API.pdf🔗
PPT Courseware
The PPT courseware for this chapter is located at: 🔗[Installation Directory]\RflySimAPIs\9.RflySimComm\PPT.pdf🔗
All Example Files
For all examples in this chapter, see the Readme documentation located at: 🔗[Installation Directory]\RflySimAPIs\9.RflySimComm\Readme.pdf🔗