Feisi Rover1 unmanned ground vehicle
1.product presentation
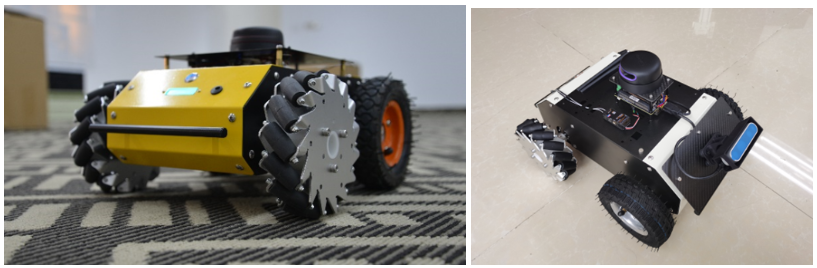
Feisi Rover1 is an intelligent unmanned vehicle for the development of unmanned vehicle systems. The body is designed with high-strength aluminum alloy, with large load capacity, strong shock absorption performance and stable operation. The vehicle is mainly composed of four parts: power supply system, drive control system, intelligent control core and sensor module. At the same time, a variety of modules can be combined for different application requirements, which can be applied to multiple scientific research fields such as heaven and earth collaboration, laser slam navigation, visual following, target recognition, artificial intelligence algorithm, etc.
2.Research direction
ROS secondary development
matlab secondary development
Development of centralized Swarm control algorithm for unmanned vehicles
Development of distributed Swarm control algorithm for unmanned vehicles
Combined with UAVs, it can coordinate formation control
Visual slam navigation, laser slam navigation development platform
Target recognition, target following and other artificial intelligence algorithm development platform
3.Version and performance
| product configuration | standard edition | flagship version |
| basic configuration | Racer Flight control, external magnetic compass | |
| Airborne board | NX Xavier | |
| Board performance | AI Computing Power:21 TOPS GPU:384-core NVIDIA Volta™ GPU with 48 Tensor Cores CPU:6-core NVIDIA Carmel ARM®v8.2 64-bit CPU 6MB L2 + 4MB L3 RAM:8 GB 128-bit LPDDR4x 51.2GB/s memory: 128GB WIFI:Integrated wifi |
|
| visual sensor | None | D435i、Thran S1 Lidar |
| functional characteristics | ROS secondary development;matlab secondary development; Development of centralized Swarm control algorithm for unmanned vehicles;Development of distributed Swarm control algorithm for unmanned vehicles; | Development of centralized Swarm control algorithm for unmanned vehicles;Development of distributed Swarm control algorithm for unmanned vehicles;Combined with UAVs, it can coordinate formation control; Visual slam navigation, laser slam navigation development platform;Target recognition, target following and other artificial intelligence algorithm development platform; |
4.Unmanned vehicle index
| Feisi Rover1 Intelligent driverless car | |
| size | length * width * height(mm)425*300*160mm |
| Vehicle weight (battery included) | 5.5kg |
| chassis clearance | 50mm |
| wheel | Rear McNamm wheel diameter 150mm |
| max load | 5kg |
| battery | 12V 10000mAh |
| communication interface | WiFi |
| max speed | 1 m/s |
| Endurance (no load) | 1 hour |
| operating ambient temperature | -20°C to 50°C |
5.Application scenarios
In addition to indoor centralized Swarm control and distributed Swarm algorithm verification, unmanned vehicles can be equipped with vision sensors to verify visual slam navigation algorithm. It can be equipped with laser sensors for laser slam navigation, which is used for indoor map construction and navigation. As a scientific research solution in the fields of unmanned vehicle Swarm, heaven and earth collaboration, visual navigation, etc., it is suitable for teaching and research in colleges and universities, as well as scientific research applications in military units.