8.1 How to Use This Chapter
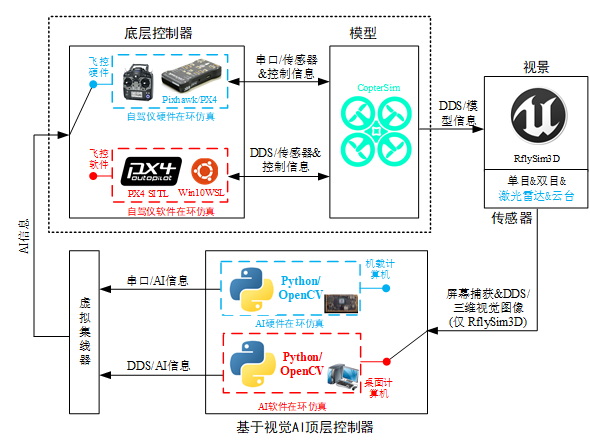
The RflySim Toolchain supports external sensor integration. Sensor data is divided into two categories: sensors directly connected to the flight controller (magnetometer, differential GPS, optical flow, etc.) and vision sensors directly connected to the onboard computer (stereo cameras, LiDAR, depth cameras, etc.). Flight controller sensor data is generated and transmitted to the Pixhawk autopilot through programs such as Simulink. Vision sensor data is generated by the 3D environment engine and transmitted to the onboard computer as images.
RflySim provides a depth camera sensor module SDK. Users can customize the onboard vision module by configuring parameters for sensor mounting orientation, focal length, field of view, and other properties. The SDK also provides decision-making system input/output interfaces according to the specified protocol.
Chapter Introduction Document
The introduction document for this chapter is located at: 🔗[Installation Directory]\RflySimAPIs\8.RflySimVision\Intro.pdf🔗
API Reference
The development API reference for this chapter is located at: 🔗[Installation Directory]\RflySimAPIs\8.RflySimVision\API.pdf🔗
PPT Courseware
The PPT courseware for this chapter is located at: 🔗[Installation Directory]\RflySimAPIs\8.RflySimVision\PPT.pdf🔗
All Example Files
For all examples in this chapter, see the Readme documentation located at: 🔗[Installation Directory]\RflySimAPIs\8.RflySimVision\Readme.pdf🔗