3.1、本章使用方法
RflySim3D在RflySim仿真工具链中所处的位置如下图所示:
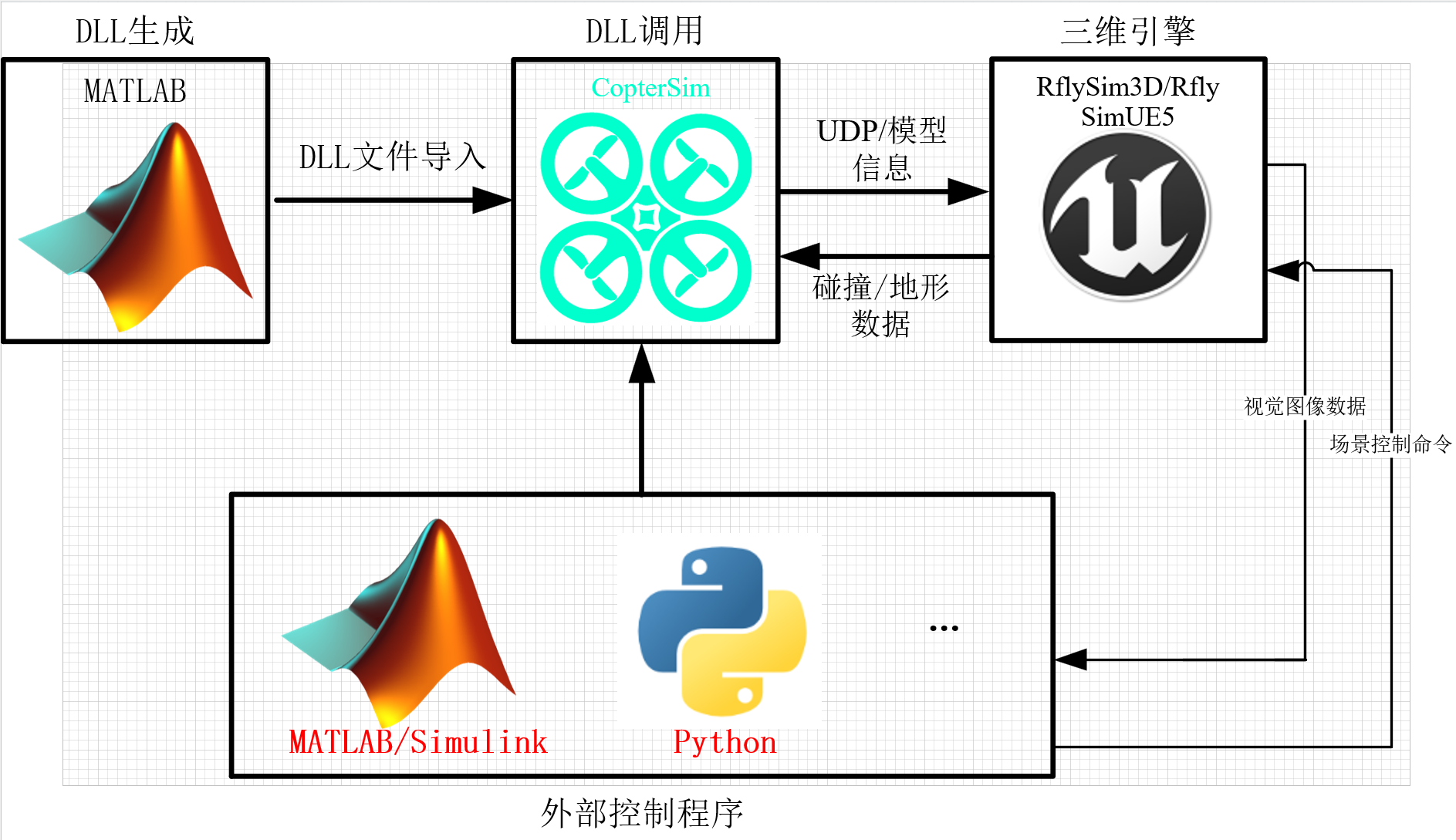
CopterSim会根据从Pixhawk(或者PX4 SITL)传入的电机控制数据解算出无人机当前的状态(主要是位置、姿态数据),随后会将这些数据发送给RflySim3D,而RflySim3D会将这些数据应用至场景里相应的无人机上,从而使我们能更直观的看到无人机的状态。 RflySim3D使用UDP通信,能够接受一些来自外部的命令,例如切换场景、创建无人机、开启UE内置的物理碰撞等,命令的细节将在RflySim3D接口与使用方法介绍中介绍,总之RflySim3D可以接受来自CopterSim、Python、Simulink的UDP命令。 RflySim3D还支持通过XML文件进行一些配置,主要是用XML配置无人机的构型(四旋翼、六旋翼、固定翼等)、模型在列表中的优先级、飞机的名字、飞机的初始位置与姿态、各致动器(一般是旋翼)的初始位置、姿态、材质、旋转轴、运动模式,还可以定义摄像机的位置,还可以定义一些障碍组件(例如柱子、圆环)等等。
本讲核心功能介绍(Intro)文件
本讲功能介绍文档地址为:🔗[安装目录]\RflySimAPIs\3.RflySim3DUE\Intro.pdf🔗
本讲API文件
本讲开发相关API接口地址为:🔗[安装目录]\RflySimAPIs\3.RflySim3DUE\API.pdf🔗
本讲PPT文件
本讲内容的PPT文档的地址为:🔗[安装目录]\RflySimAPIs\3.RflySim3DUE\PPT.pdf🔗
本讲所有例程文件
本讲所有例程请见Index文档,该文件的地址为:🔗[安装目录]\RflySimAPIs\3.RflySim3DUE\Index.pdf🔗