4.3、本章常见问题
4.3.1、搭建的控制器用connect io模式试的时候一切正常,然后想拷贝代码到px4上,换成run on board 模式,点击build后,他会一直卡在60%的地方,重新拔插usb也没反应,请问应该怎么解决呢?
问题解答:
搭建的控制器目前RflySim工具链只支持拷贝到工具链自带的模版里面去。
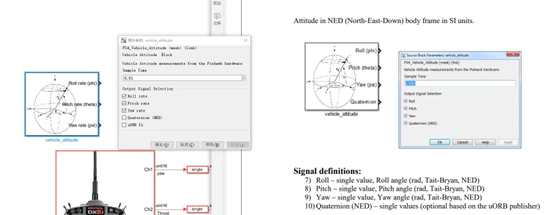
4.3.2、vehicle_attitude这个模块在simulink和PSP官方帮助文档里怎么不太一样,一个测的是角速度,一个测的是角度,这是为啥?
问题解答:
RflySim工具链针对该模块进行了二次开发,角度用四元数算出来。"vehicle_attitude"模块在Simulink中可能被设计用于模拟或控制飞行器的姿态(即姿态控制),因此可能测量的是飞行器的角度信息,例如俯仰角、横滚角和偏航角等。
而在PSP中,"vehicle_attitude"模块可能被设计用于虚拟仿真环境或其他类型的模拟器中,用于模拟车辆或飞行器的运动行为。在这种情况下,该模块可能会测量飞行器或车辆的角速度(即姿态速率),而不是角度信息。
另外,"vehicle_attitude"模块在不同的软件环境下可能被设计为不同的工具箱或组件,因此其功能和用法可能会有所不同,导致文档描述的差异。
总的来说,不同软件环境下的模块功能可能有所不同,需要根据具体的上下文和使用场景来理解其功能和描述。
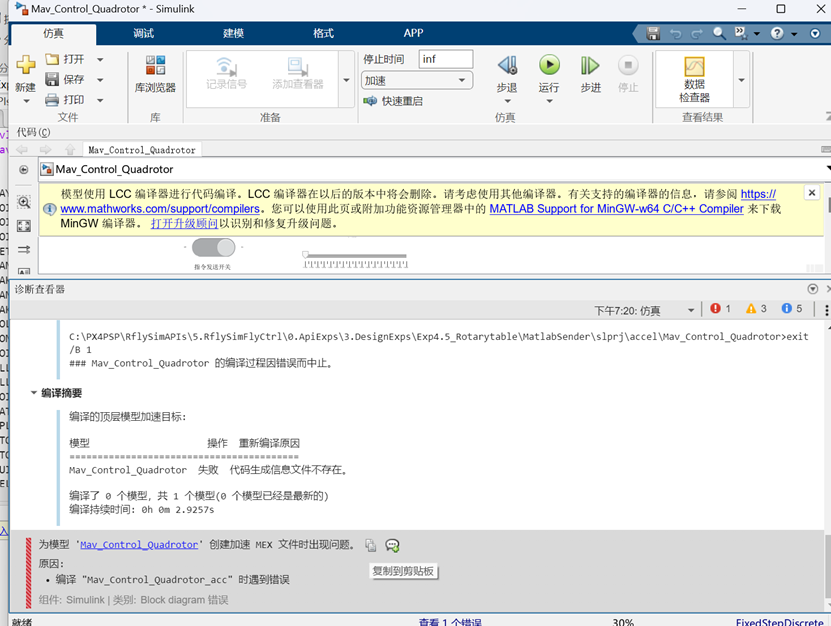
4.3.3、运行Mav_Control_Quadrotor这个Simulink文件时遇到报错,如何改变模型使用的编译器?
问题描述:
问题解答:
需要在电脑上安装Visual studio,另外,这个程序是Windows下运行的Simulink程序,不是烧到飞控里面的,直接运行即可,要装 Visual Studio并设置mex编译器才可以正常运行程序。
4.3.4、固定翼飞机,在飞行过程中,可不可以更改航线?
问题解答:
在飞机飞行的过程中更改飞行任务是不可以的, 但是可以更改飞机的飞行航点,在画完航线,返回QGC首页,在飞机飞行任务途中在地图界面点击右键可以选择新的飞行航点。
4.3.5、如果想运行无人车的硬件在环仿真,需要烧入什么固件?
问题解答:
4.3.6、我们注意到无人机的俯仰角和滚转角是内部计算给定的,是否可以更改底层串联模型,能够控制无人机的俯仰角和滚转角?
问题解答:
目前用到的Offboard接口一般是速度高度偏航角这种,不确定有没有俯仰和滚转的控制接口,速度高度偏航角也可以实现。
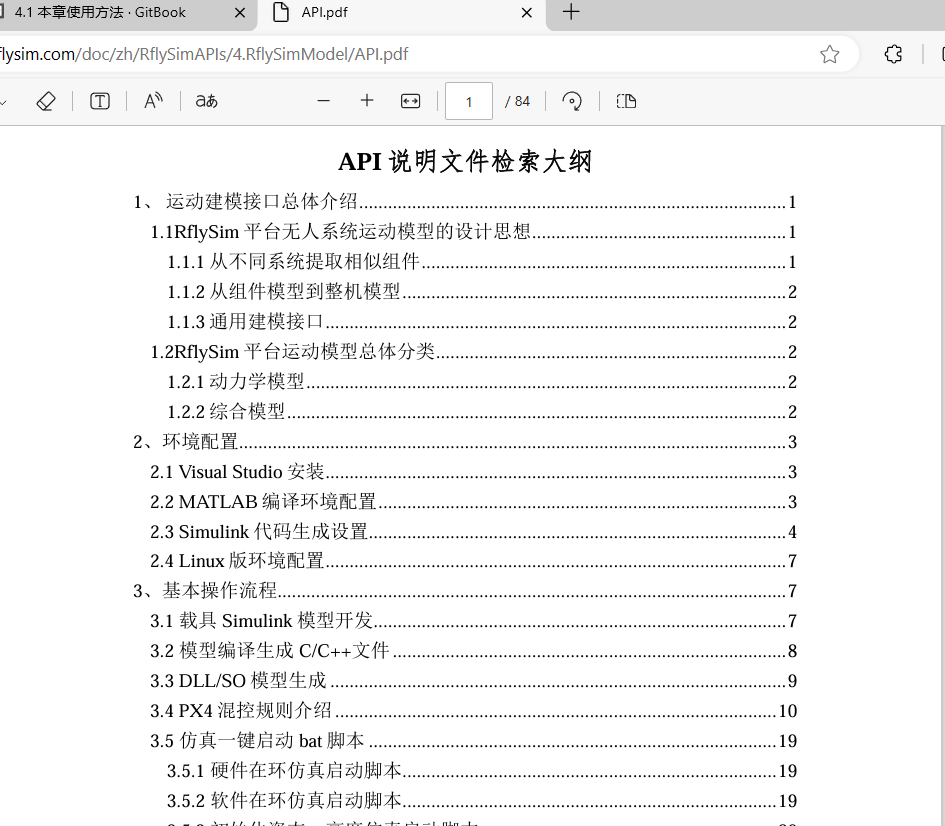
4.3.7、CopterSim与别的部分收发数据协议哪里能看到?
问题解答:
安装目录\RflySimAPIs\4.RflySimModel\API.pdf"看下这个PDF的介绍文档,里面有接口的一些使用说明可以进行参考。
4.3.8、在进行4.RflySimModel下边inCopterData 输入接口实验,model中ExtToPX4输出的值没办法在uorb rfly_sim读取,显示 never published ,导致例程有问题,该怎么解决?
问题描述:
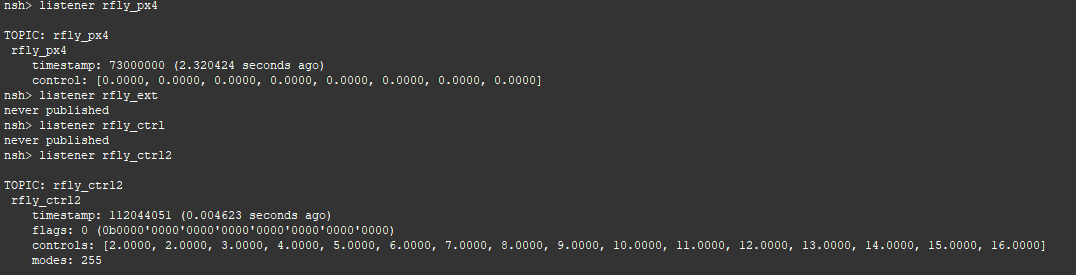
问题解答:
需要更新下RflySim工具链,最新一版已经修复该问题。
4.3.9、在例程6.1的基础上,更改了无人机的控制分配矩阵模型,但是在模型编译的时候一直会出现一些信号没有办法识别和矩阵维数不对的错误,请问这种情况要怎么解决呢?
问题描述:
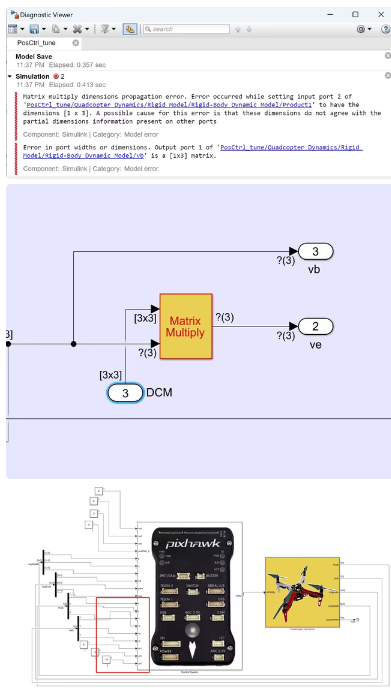
问题解答:
先自己建个空白模型,去测试矩阵乘法之类的是否符合预期,加深对simulink编程的理解。
4.3.10、请问在e6.4节中烧录到飞机的代码中,发布电机PWM信息的是actuator_outputs还是actuator_outputs_rfly?
问题描述:
问题解答:
你得看这两条uORB消息分别是干什么的。
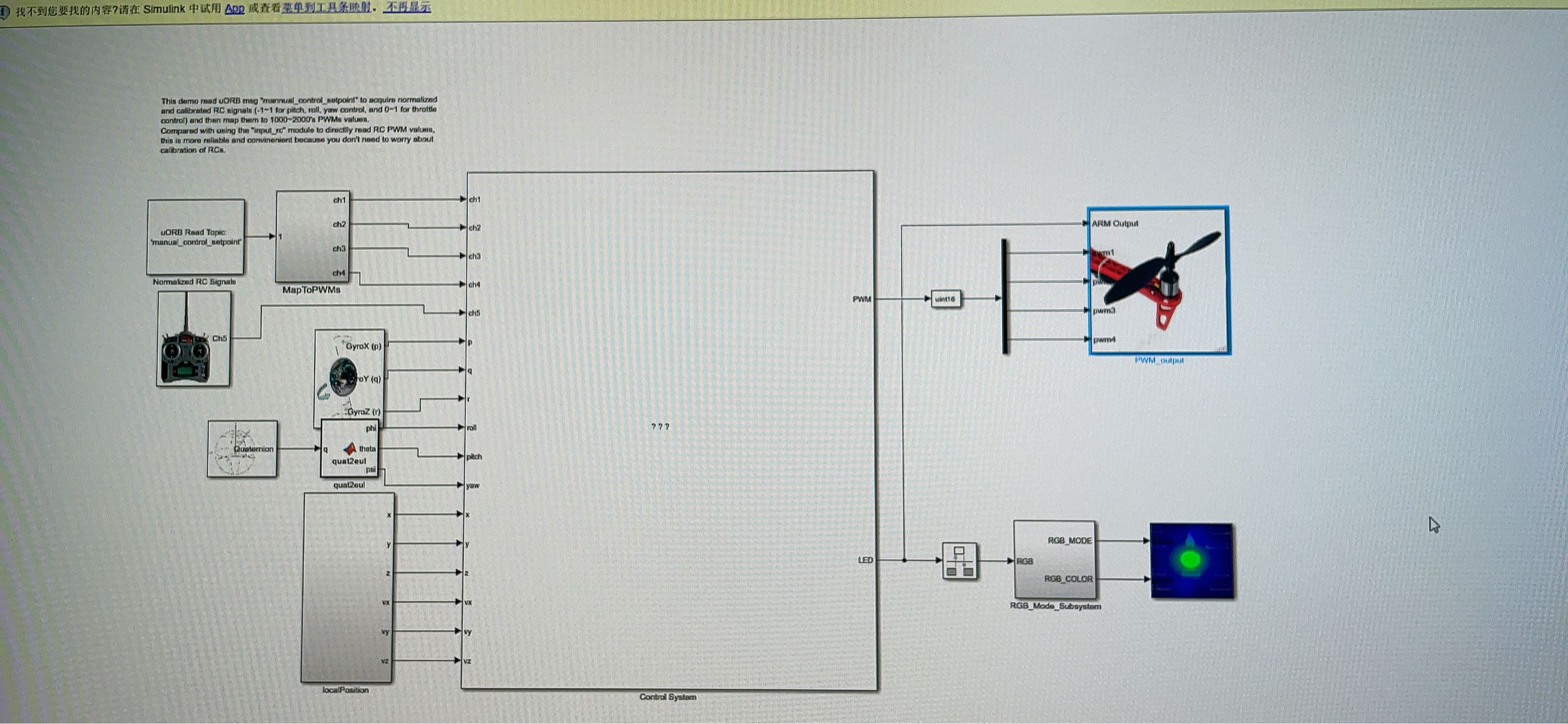
4.3.11、将simulink控制器的输出通过PWM_output模块发布消息,编译后下载到pixhawk中,检测电机输出发现数据不符。我已经屏蔽了px4官方控制器的输出,请问这是什么原因?
问题解答:
如果是自己写的控制器,那么可能对控制器的输入输出理解不准确。如果是直接在程序里写死了pwm脉宽,那就是观测方式没有读到正确的数。
4.3.12、请问一下这个imu频率太低是不是由于电脑性能不太行造成的,使用px4ctrl起飞后非常不稳定,使用offb例程起飞后摆动幅度较大?
问题描述:
问题解答:
C:\PX4PSP\Firmware\ROMFS\px4fmu_common\init.d-posix\px4-rc.mavlink
如果是SITL仿真,要修改上面这个文件,默认IMU发送频率是50Hz,要改成200。这里面用不到的一些消息,你可以注释掉,避免占用太多带宽。
4.3.13、在姿态控制实验硬件在环中无法识别到飞控板的存在,反复插拔也不行,在Apiexps实验中没有问题,请问这是因为什么,使用的飞控板是卓翼H7
问题解答:
你可以去电脑的设备管理器中把不用的端口禁用掉,若还不行,可以通过QGC烧录固件。
4.3.14、在做底层控制开发时,比如我想用dshot协议(因为看网上说dshot协议不用校准电调),这时候把电调上的信号线接到了fmu口上,此时还能用工具箱里的pwmout模块吗?
问题解答:
用力和力矩那个模块,pwm_output不支持Dshot
4.3.15、请问做硬件在环实验时,从matlab下载固件到飞控板,为什么每次qg地面站的机架和遥控器都需要重新设置呢?(卓翼的h7飞控)
问题解答:
升级一下bootloader,SYS_BL_UPDATE找下这个参数,设置成1之后重启一下飞控。