2.3、本章常见问题
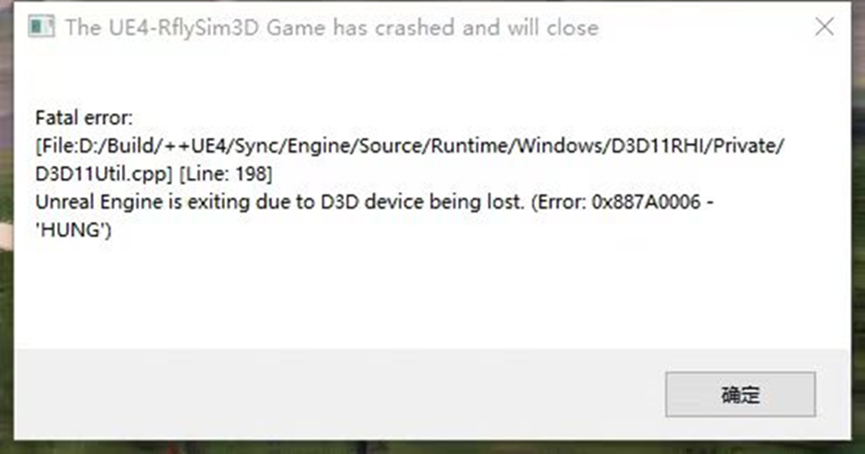
2.3.1、SIL或HIL仿真时,RflySim3D出现:Fatal error:[File:D://Build/++UE4....]...报错
具体报错界面如下所示:
问题解答:
上述RflySim3D的报错问题,可能是由于电脑的显卡驱动所造成的兼容性问题,建议升级显卡驱动到最新版,看下能否解决;如果不能解决,请联系RflySim工具链相关售后人员。
2.3.2、QGC的Analyze Tools-飞行日志,下载时刷新完之后,找不到我做硬件在环对应时间的日志
问题解答:
打开QGC,进入载具设置
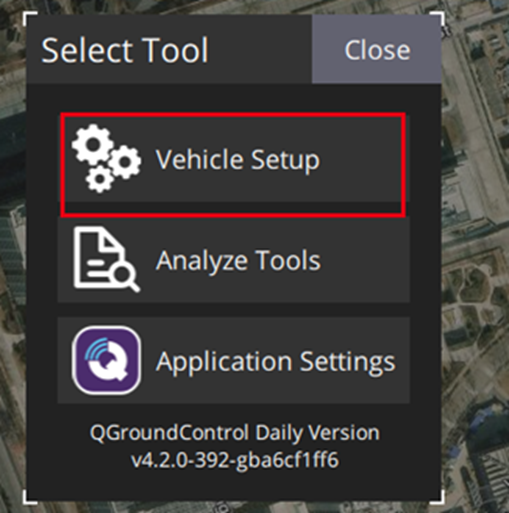
到最下面的参数标签,搜索“log”,找到了SDLOG_MODE的参数,将其改成下图,从开机到关机,一直记录log,这样就能看到log日志了。

2.3.3、安装RflySim工具链时,显示Ubuntu18.04安装失败,如何解决?
问题解答:
先wsl把默认版本改为1再打开ubuntu的终端,如出现无法解析服务器的名称或地址,输入这个就行 wsl --set-default-version 1,原因是win11默认启用wsl2, 但是内核又没有更新,所以ubuntu配置失败。 所以配置为默认wsl1即可。
2.3.4、无人机软件在环仿真飞行的数据(高度,速度,历史数据)怎么查看?
问题解答:
1.在线查看飞行日志(软件在环,硬件在环都是可以的),先跑完软/硬件在环在QGC打开左上角图标,再点击Analyze Tools。
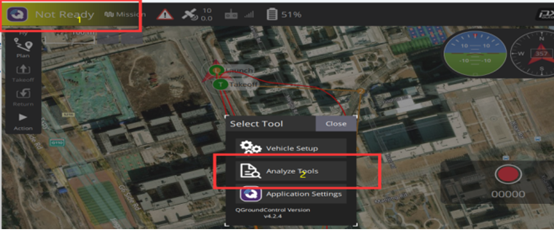
再点击Log Download,进行Refresh日志列表,选择要下载的日志,点击Download
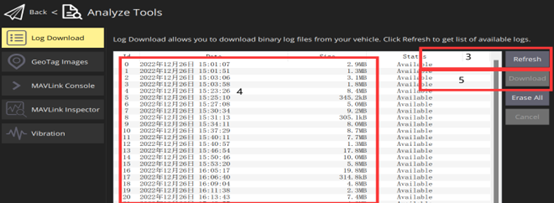
选择下载的路径会生成一个ulg格式的文件
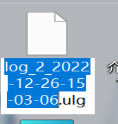
打开https://logs.px4.io/网站点击Choose File查找ulg格式的文件,进行上传
就可以查看到飞行的数据如下图所示:

2.3.5、烧APM固件做硬件在环仿真的时候遇到问题如何解决?
问题解答:
RflySim工具链目前不支持APM的硬件在环,APM的硬件在环仿真,需要用到我们的FPGA那一套仿真工具链,拆下飞控传感器,直接硬件模拟传感器芯片信号,不过这个还没正式发布。
2.3.6、MATLAB2022a装RflySim后在MATLAB附加功能中没有 px4 psp工具箱?
问题解答:
2021版开始,在功能包管理模块中不再显示PX4 PSP模块,但是不影响正常使用。
2.3.7、如何把新的FlightGear机场视景加到无人机仿真里面?
问题解答:
FlightGear那套已经停止维护了,可以去官网下载新版,然后自行配置连接。
2.3.8、每个例程的.bat文件是用什么来写的?
问题描述:
如下图所示的.bat文件:
问题解答:
该文件为RflySim工具链的批处理脚本,便于快速启动相关软件和程序。
2.3.9、RflySim工具链的例程,启动.bat脚本启动的通信文件是哪个?
问题解答:
首先.bat是启动程序的,当然bat中的参数也是作用于程序的。 注意通信怎么建立的,首要区分谁和谁通信,才能确定使用什么方式去通信,让开发人员理解怎么使用系统,讲清每个模块或者软件之间的调用关系,模块之间的调用关系如下图所示:
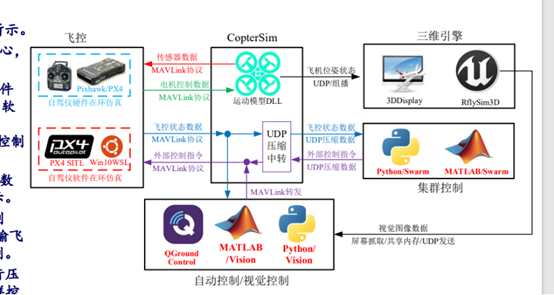
工具链三大块,RflySim3D , CopterSim, QGC。RflySim3D:视化模型相关,CopterSim:运动控制模型相关,QGC 地图及规划相关及可视化。关系,RflySim3D显示载体模型,CopterSim通过加载对应载体的控制模型 与 RflySim3D里载体模型绑定,控制载体运动,QGC与CopterSim,通过在QGC设置目标点等对载体进行轨迹规划等。
2.3.10、软件可否用docker容器运行单个无人机仿真程序?可以的话应该怎么实现?如果我们要实现一个大规模集群的仿真,那么该如何用dokcer进行软件的部署?(暂不考虑硬件)。当规模非常大的时候,出现卡顿是正常现象,有没有什么优化的措施?可否有例程demo的代码流程讲解?
问题解答:
这个要用Linux版RflySim,目前没对外公布。针对大规模集群,我们正在开发云端版本,目前正在进行中。目前,软件在环,一台电脑推荐支持15个以内,太多了会不稳定。
2.3.11、硬件在环跟飞控里面的固件有关系吧,这个怎么说呢?
问题解答:
硬件在环仿真过程是先把自己生成的或者官方固件写到飞控,然后硬件在环仿真时飞控从CopterSim获取传感器信息,根据这个算出控制信息传给CopterSim。
2.3.12、RflySim工具链支持 Linux 系统了吗?
问题解答:
Linux版本一直都有,不过主要是内部测试使用。后面应该不会免费开放,需要单独购买。
2.3.13、uorb write模块添加就报错,是不是有默认的调用地址,这个是怎么设置的?
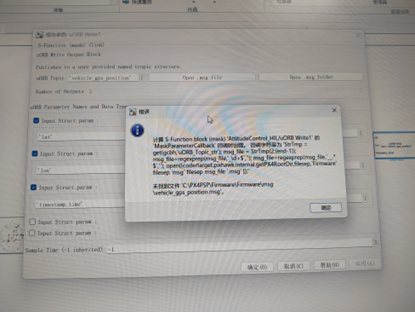
问题解答:
用刚打开的Simulink的这个MATLAB重新装一下工具链,第5项选择“是“,重新安装PSP工具箱选择是。
2.3.14、上传固件的时候报如下图所示的错误:
问题描述:

问题解答:
去设备管理器里面,看看有哪些COM端口,可能是设备太多。
1)查看一下电脑在插入飞控的时候有没有端口显示,要是没有就是驱动有问题,运行一下这个文件"【安装目录】\drivers\driver.msi"重新装一下驱动试试
2)如果有端口显示,还识别不到就是你们电脑上估计插入的设备太多了,识别到其他设备了,可以将不用的设备端口禁用试试。
3)以上两种办法都不行的话,那只能通过QGC烧录固件了。
2.3.15、RflySim 可以支持国产平台(麒麟系统,飞腾芯片,或者统信系统,海光芯片可以支持吗)运行吗?win7 可以运行吗?
问题解答:
(麒麟系统,飞腾芯片,或者统信系统,海光芯片可以支持吗)没有做过这些的测试,工具链最低运行系统是win10。
2.3.16、安装RflySim工具链报错问题如何解决?
问题描述:
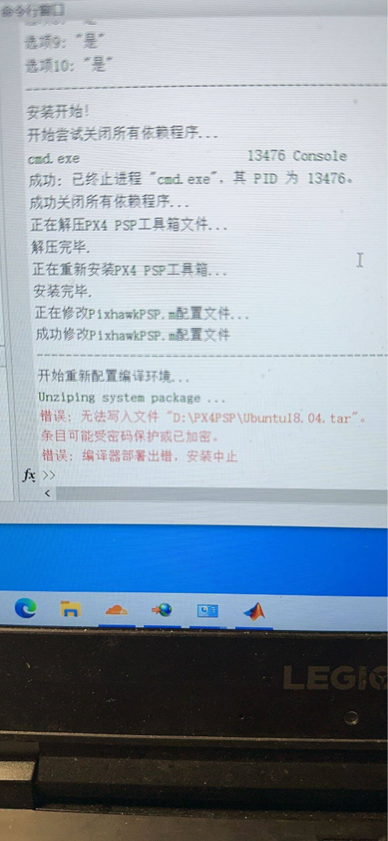
问题解答:
安装包有问题,建议重新下载安装包进行下载。
2.3.17、安装时出现电脑蓝屏的现象如何解决?
问题描述:
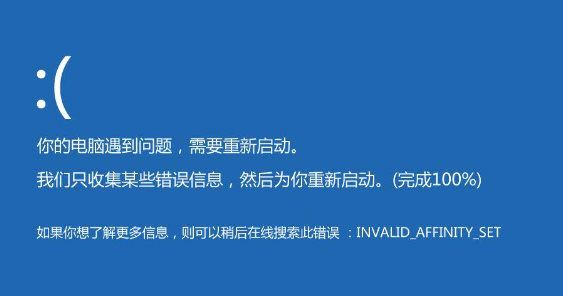
问题解答:
可能是电脑的硬盘空间不够,只能重新更换硬盘更换安装路径,再重新进行安装。
2.3.18、有QGC刷固件的例子或方法说明吗?
问题解答:
可以参考如下所示的路径:[RflySim安装目录]/RflySimAPIs/2.RflySimUsage/1.BasicExps/e10_Firmware-Upload/Readme.pdf
2.3.19、在电脑不能联网的情况下,安装完成工具链后,QGC界面的地图无法显示?
问题描述:
 问题解答:
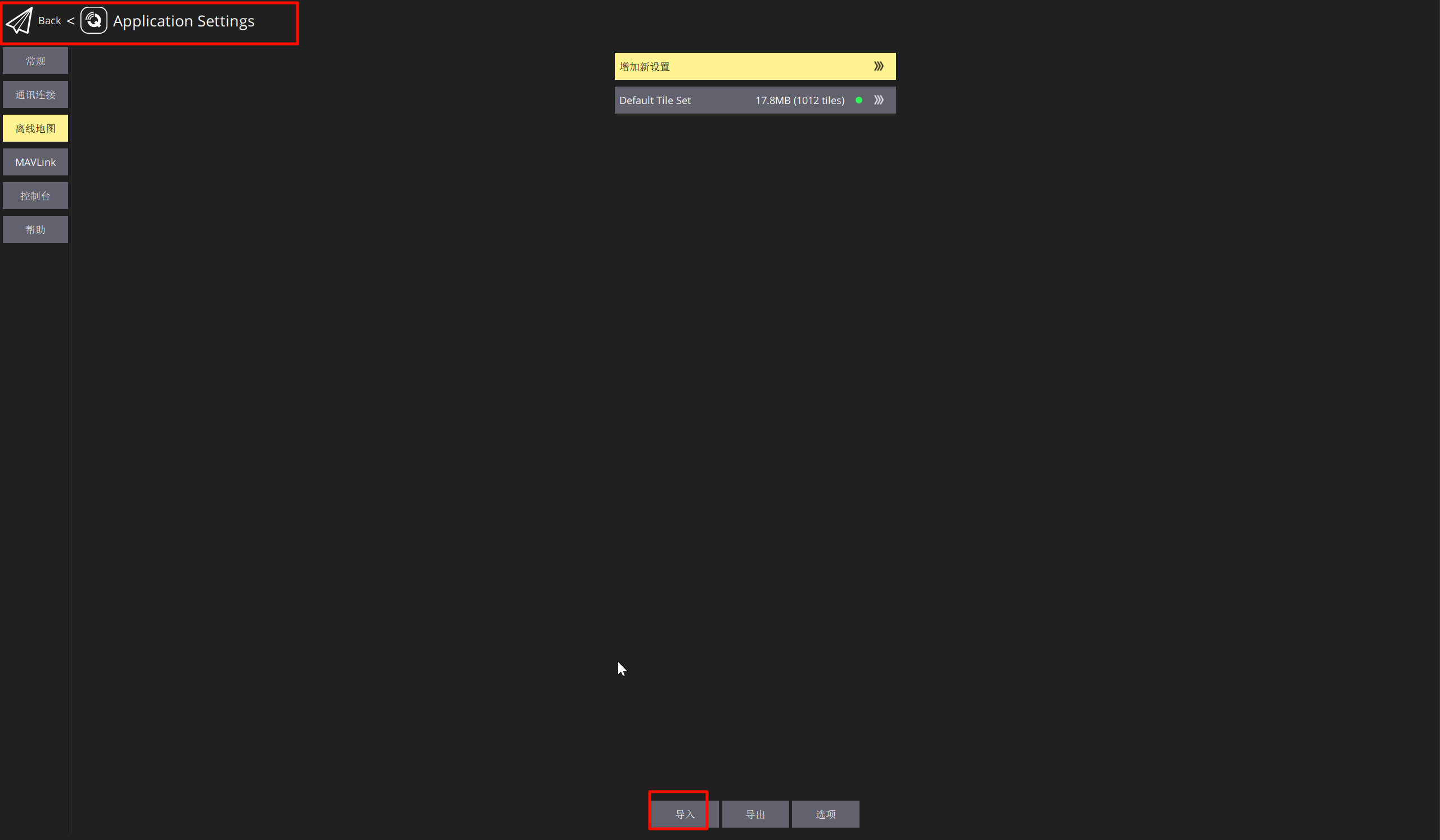
QGC地面站中的地图需要在联网状态下自动进行下载,新版工具链已经将地图块片内置到安装包中了,若安装完成后还无法显示地图,你可下载文件:RflySim_QGCdefaultMap,然后安装如下方式进行导入(弹出的界面中选择替换现有地图即可!)
问题解答:
QGC地面站中的地图需要在联网状态下自动进行下载,新版工具链已经将地图块片内置到安装包中了,若安装完成后还无法显示地图,你可下载文件:RflySim_QGCdefaultMap,然后安装如下方式进行导入(弹出的界面中选择替换现有地图即可!)
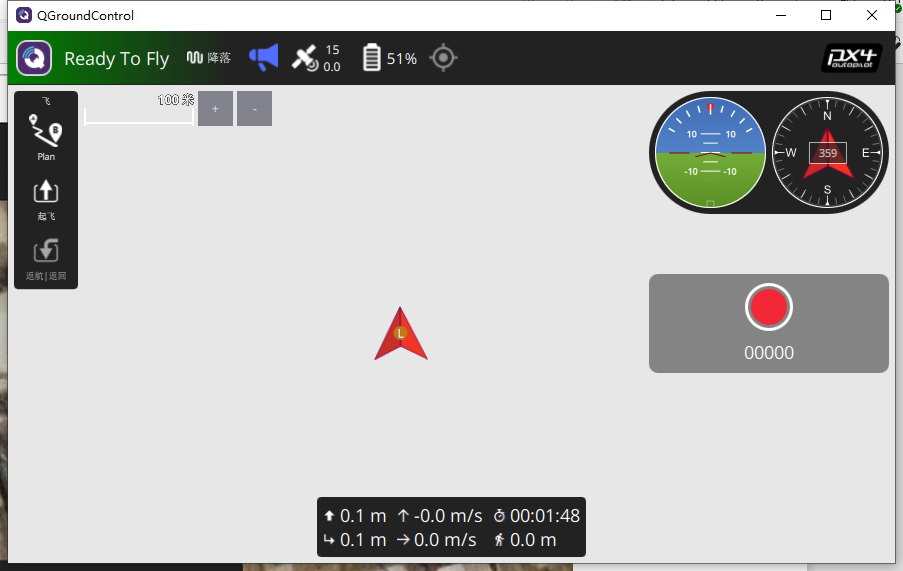
2.3.20、请问,我在验证工具链配置成功与否的阶段QGroundControl背景没有正常显示是什么原因呢? 飞行环境界面无人机能正常起飞。
问题描述:
问题解答:
需要在联网的电脑上进入地面站的离线地图,把离线地图下载下来,然后复制到没有联网的电脑上去导入。具体QGC地面站离线地图功能二次开发可参考该链接:https://blog.csdn.net/qq_48597462/article/details/138273107?utm_source=miniapp_weixin。
2.3.21、请问各位有试过仿真的时候更改飞机的起始点经纬度吗?
问题解答:
最新版RflySim工具链才有这个功能。限完整版。
- 修改CopterSim里面txt最后三位,设置场景中心点的基准经纬高
- bat脚本里面设定。参考RflySimAPIs\BatScripts\SITLPosStrGPS.bat,对应例程可以找找。
2.3.22、有个问题想请教下,coptersim的仿真频率是1000hz(matlab中的步长是0.001),那我的控制率也是1000hz,但是我在硬件闭环的时候我的舵机是用串口控制的,它跑不到那么快,而且实际传感器更新速率也没有那么快,我在增加仿真步长的时候会发现coptersim跑的特别快,这个应该怎么处理呢,单纯的降低控制频率发现会失控?
问题解答:
控制频率250hz就行了,飞控内滤波器没这么快。仿真步长是1000hz,但是不是数据发送频率这么快,传感器数据发给飞控大概是250hz,你的控制器可以设定自己的采样率,只要是0.001的整数倍就行。
2.3.23、在验证工具链配置成功与否的阶段QGroundControl背景没有正常显示是什么原因呢?飞行环境界面无人机能正常起飞。
问题解答:
网络问题,这个地图是在线加载的,这个并不影响使用,只是外观问题。你把鼠标滚动一下试试,或者设置换个地图源。如果联网正常的话,可以试一下
1.关闭网络防火墙,重启QGC地面站
2.步骤1实现不了的话,就需要重启一下电脑试试了。
2.3.24、之前在RflySimAPIs文件夹里写的文件还能找到吗,没备份直接重装了,现在python文件找不到了
问题解答:
有个backup文件夹的,要是运行了Uninstal,就没了。