4.1、本章使用方法
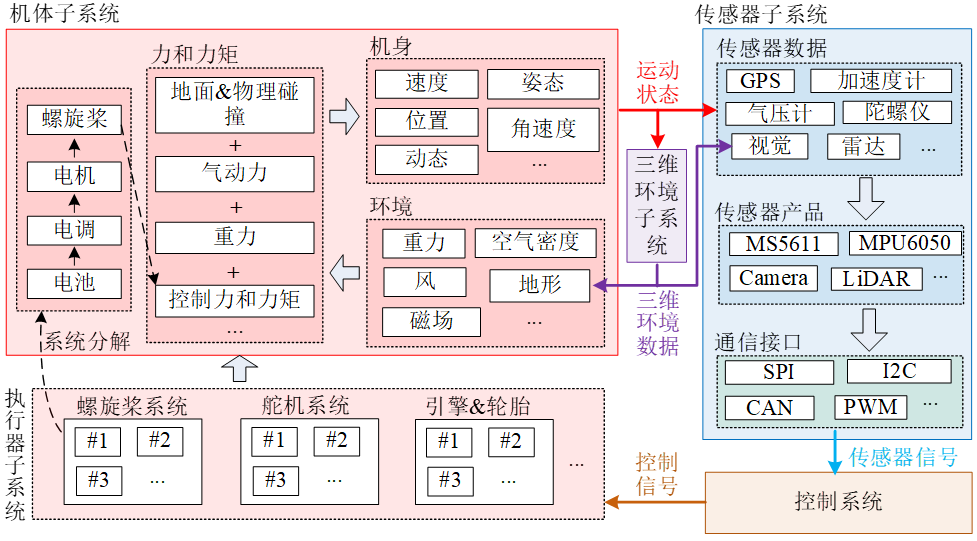
无人载具系统统一建模框架将整个无人载具系统分解为两个部分:机身系统与控制系统。机身系统与控制系统之间进行着传感器数据与控制信号。而机身系统又可以细分为四个子系统:机体子系统、执行器子系统、三维环境子系统和传感器子系统。
• 机体子系统包含了机身、运行环境、力与力矩等内部子系统模块,是对机体在环境的运动、能耗和故障特性的整体描述;
• 执行器子系统包含了飞行器与外界环境的相互作用,它接收来之控制系统的控制信号,然后产生的力与力矩来驱动机身运动;
• 传感器子系统主要用于描述控制软件之外的所有电子硬件模型,主要包含传感器数据、通信协议、连接接口等特性;
• 三维环境子系统主要用于描述无人飞行的三维视景环境(包括树木、障碍物、公路等),用于为自主控制系统提供视觉数据的模拟。
在整个建模框架中,机身系统需要进行高精度建模,并且在实时仿真计算机中实现,最后连接控制系统软件或硬件,构成软件在环仿真或硬件在环仿真闭环。
上述建模框架可以在Simulink等可视化建模与仿真软件中快速实现,在整个仿真模型搭建完毕后,可以利用自动代码生成的方法生成不同实时仿真计算机环境下的仿真软件,并且通过替代其中特定的子系统模块可以快速扩展得到不同类型的载具模型。所示为Simulink中搭建大多旋翼仿真模型示例,它包含了基本的运动仿真功能以及故障注入功能,能够非常逼真地仿真各种多旋翼的运动动态。
同时,RflySim提供Simulink无人动力学建模模版,支持多种旋翼类型,便于模型开发与扩展;提供标准输入输出接口,可在Simulink中自行搭建任意构型无人模型;支持Simulink自动代码生成为DLL文件的形式导入到硬件在环仿真器中;动力系统组件数据库覆盖市面上2000款以上组件产品,支持从数据库中选择合适的电机、螺旋桨等组件组装不同构型多旋翼(三、四、六、八旋翼)并估算性能(悬停时间、最大拉力等)与模型参数(质量、转动惯量、螺旋桨拉力系数等),用于多旋翼动力学仿真。
本讲核心功能介绍(Intro)文件
本讲功能介绍文档地址为:🔗[安装目录]\RflySimAPIs\4.RflySimModel\Intro.pdf🔗
本讲API文件
本讲开发相关API接口地址为:🔗[安装目录]\RflySimAPIs\4.RflySimModel\API.pdf🔗
本讲PPT文件
本讲内容的PPT文档的地址为:🔗[安装目录]\RflySimAPIs\4.RflySimModel\PPT.pdf🔗
本讲所有例程文件
本讲所有例程请见Index文档,该文件的地址为:🔗[安装目录]\RflySimAPIs\4.RflySimModel\Index.pdf🔗