2.1、本章使用方法
RflySim工具链包含了众多在进行无人系统建模、仿真、算法验证等开发过程中所涉及到的软件,其中,核心组件有CopterSim、QGroundControl、RflySim3D/RflySimUE5、Python38Env、Win10WSL子系统、SITL/HITLRun一键运行脚本、MATLAB自动代码生成工具箱、Simulink集群控制接口、PX4 Firmware源码、RflySim配套资料文件以及配套硬件系统。用户通过对这些核心组件的学习即可快速上手无人系统的开发和测试工作。
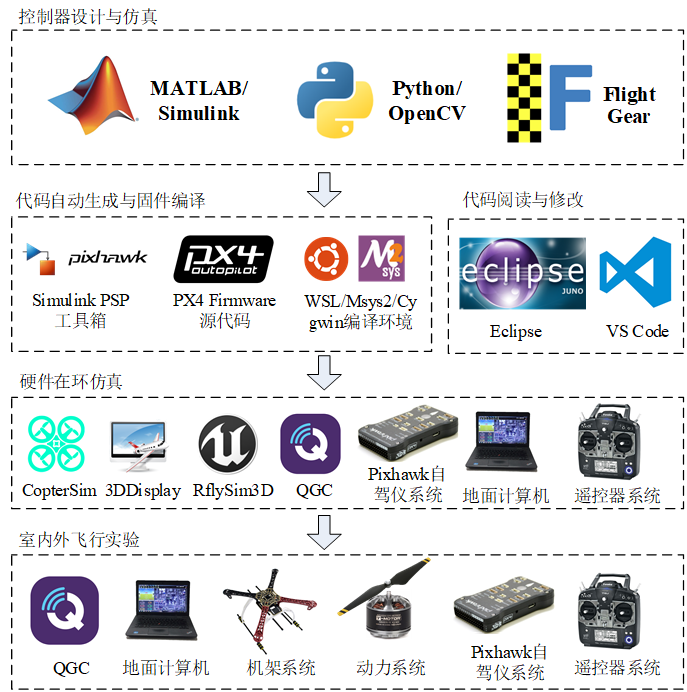
RflySim工具链实验流程主要分为底层控制系统开发实验流程和顶层控制系统开发实验流程。其中,底层控制系统开发依据从易到难的依次顺序分为:算法开发与数字仿真验证阶段、简化模型联调阶段、软件在环仿真阶段、硬件在环仿真阶段、室内外飞行实验;顶层控制系统开发包括机载板卡硬件在环阶段、多机HIL仿真阶段、单机自主控制阶段、半实物集群控制阶段、真机集群控制阶段以及完全真实环境下的多机协同阶段。
本讲核心功能介绍(Intro)文件
本讲功能介绍文档地址为:🔗[安装目录]\RflySimAPIs\2.RflySimUsage\Intro.pdf🔗
本讲API文件
本讲开发相关API接口地址为:🔗[安装目录]\RflySimAPIs\2.RflySimUsage\API.pdf🔗
本讲PPT文件
本讲内容的PPT文档的地址为:🔗[安装目录]\RflySimAPIs\2.RflySimUsage\PPT.pdf🔗
本讲所有例程文件
本讲所有例程请见Index文档,该文件的地址为:🔗[安装目录]\RflySimAPIs\2.RflySimUsage\Index.pdf🔗