工具链长期支持飞控介绍
1. Pixhawk 6C & 6C mini
Pixhawk6C 是 Holybro 成功的 Pixhawk® (飞行)控制器系列的最新升级产品,具有 STM32H7 cpus、IMU 振动隔离、冗余 IMU 和 IMU 加热功能。它有两种外形尺寸。6C Mini 缩小了尺寸,内置 PWM 电机/伺服头,但端口数量略少。其特点有:
- 高性能STM32H743处理器,运算能力更强,内存更大
- 全新高性价比设计,外形小巧
- 全新设计的集成隔振系统可过滤高频振动并降低噪音,确保读数准确
IMU 由板载加热电阻器进行温度控制,使 IMU 处于最佳工作温度下

2. RflySim配置
如果使用的是Pixhawk 6X 的飞控硬件,推荐使用下图所示软件安装配置,硬件连接配置同Pixhawk 2.4.8相同。
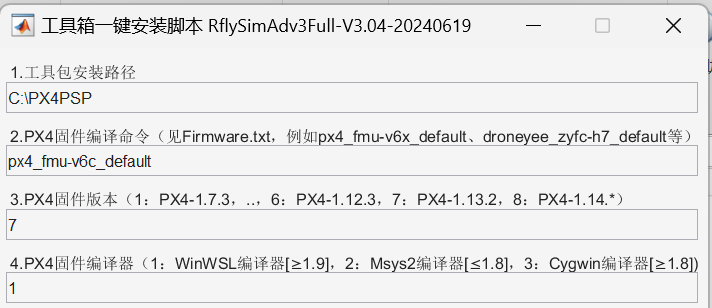
- 使用px4_fmu-v6c_default编译命令。
- 使用“7”:PX4 1.13.2版本固件。
- 使用“1”:WinWSL编译器。
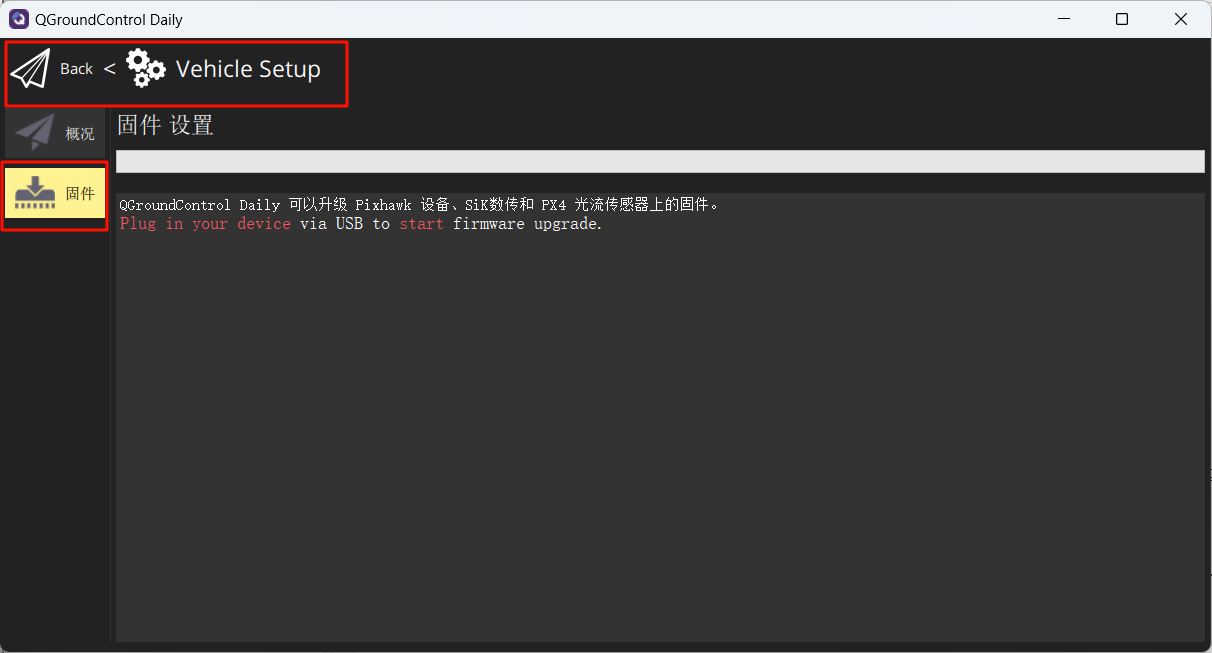
3. 官方固件及还原
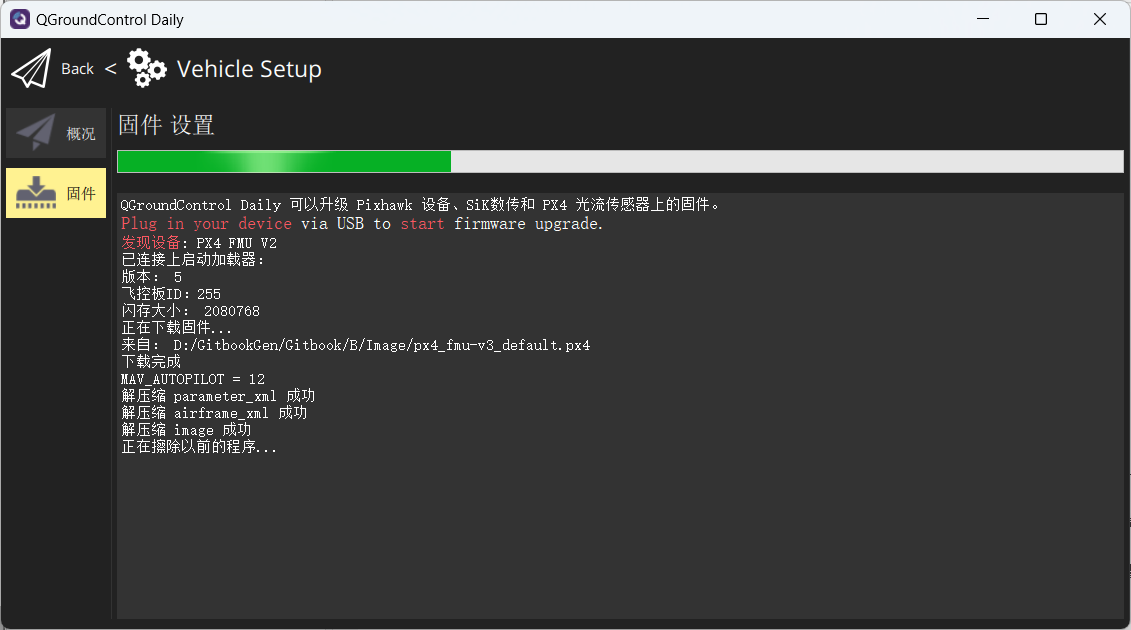
打开QGC地面站,进入如下界面中。
链接飞控到电脑上,在弹出的界面中进行如下选择,选择烧录固件:px4_fmu-v6c_default.px4
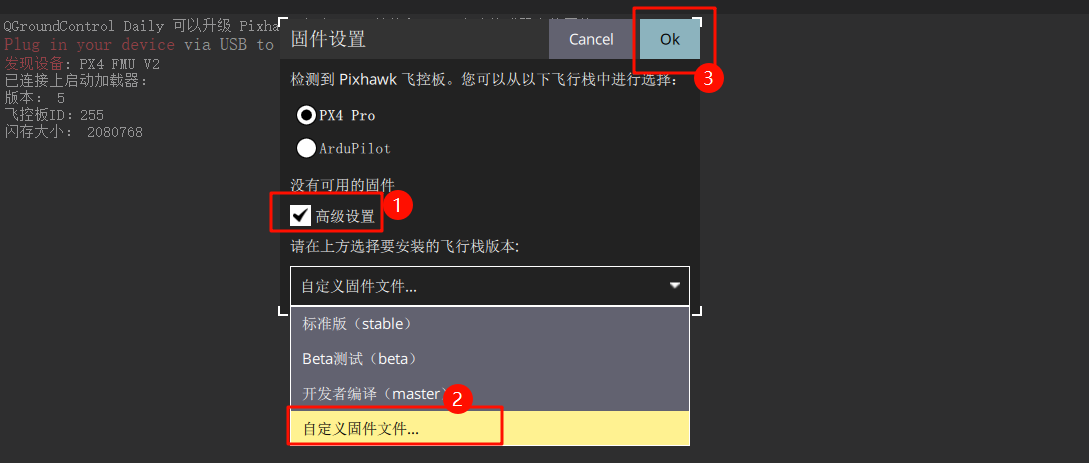
等待烧录完成。
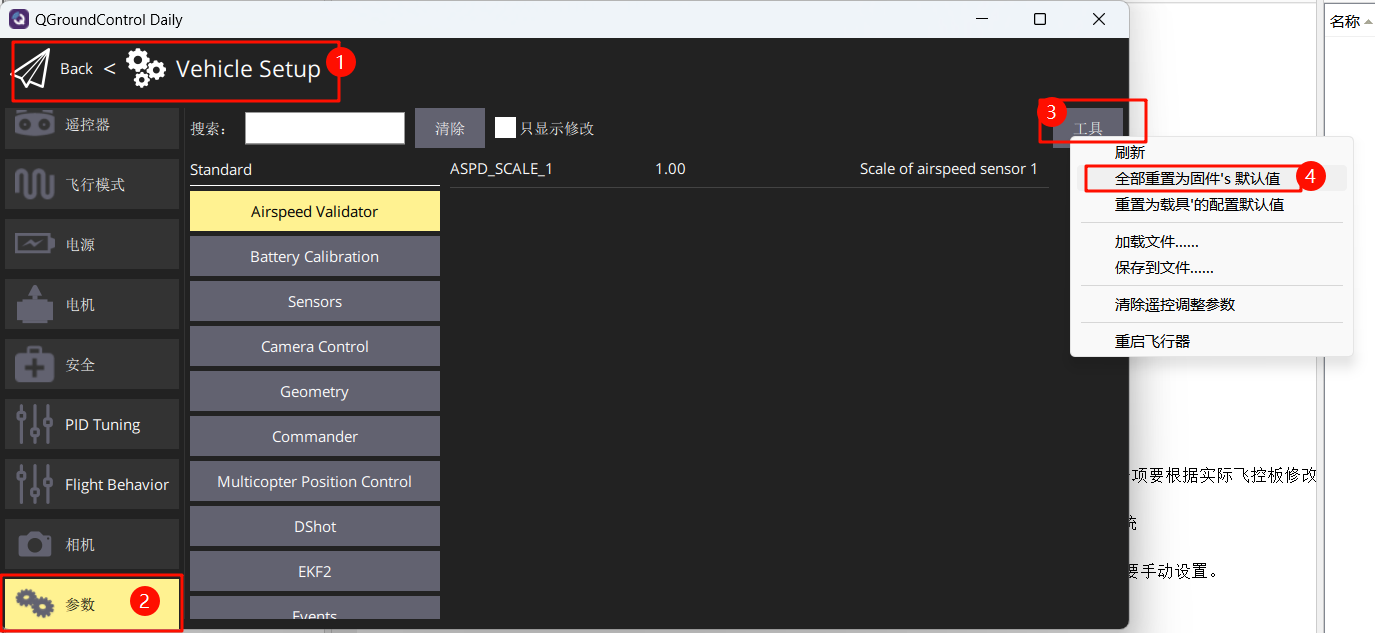
还原飞控的参数为固件的默认值。
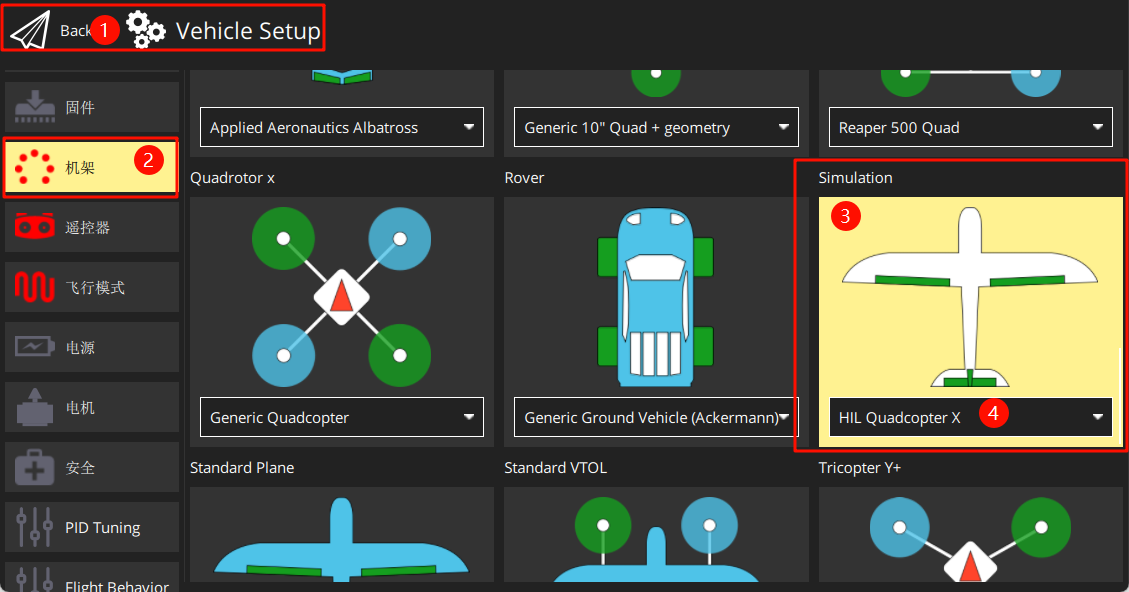
设置机架为HIL Quadcopter X,滑动到最顶端点击“应用并重启'',等待重启完成。

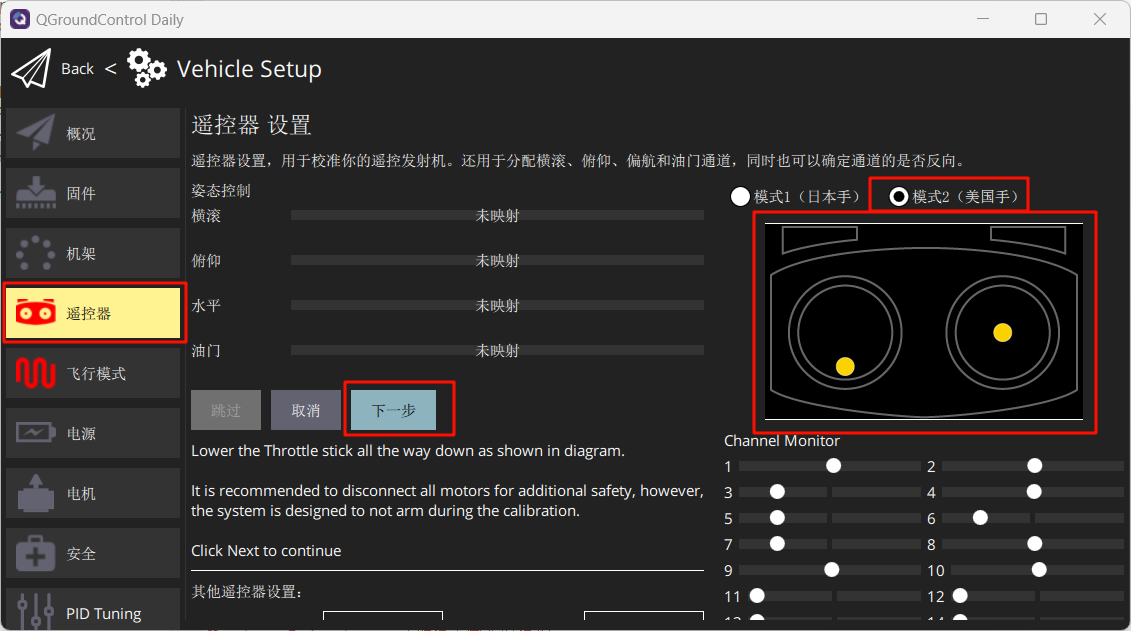
链接上遥控器接收机(注意线序),并打开遥控器。按照图示进行校准遥控器。
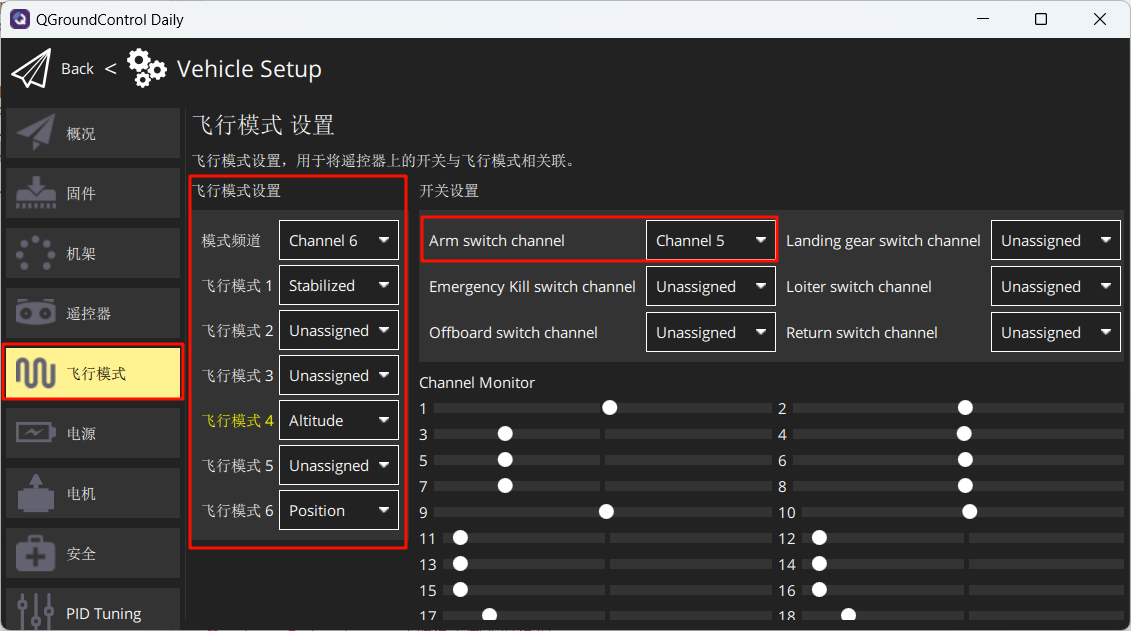
设置飞行模式如下图所示。
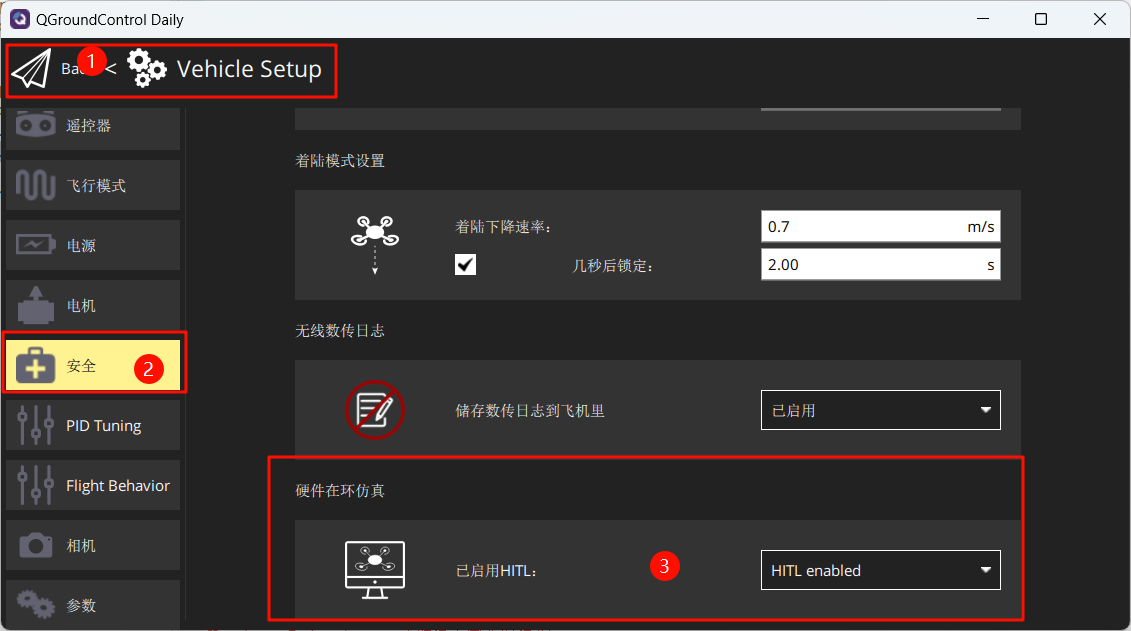
在安全中设置只使能硬件在环仿真。
4. 启动硬件在环(HIL)仿真
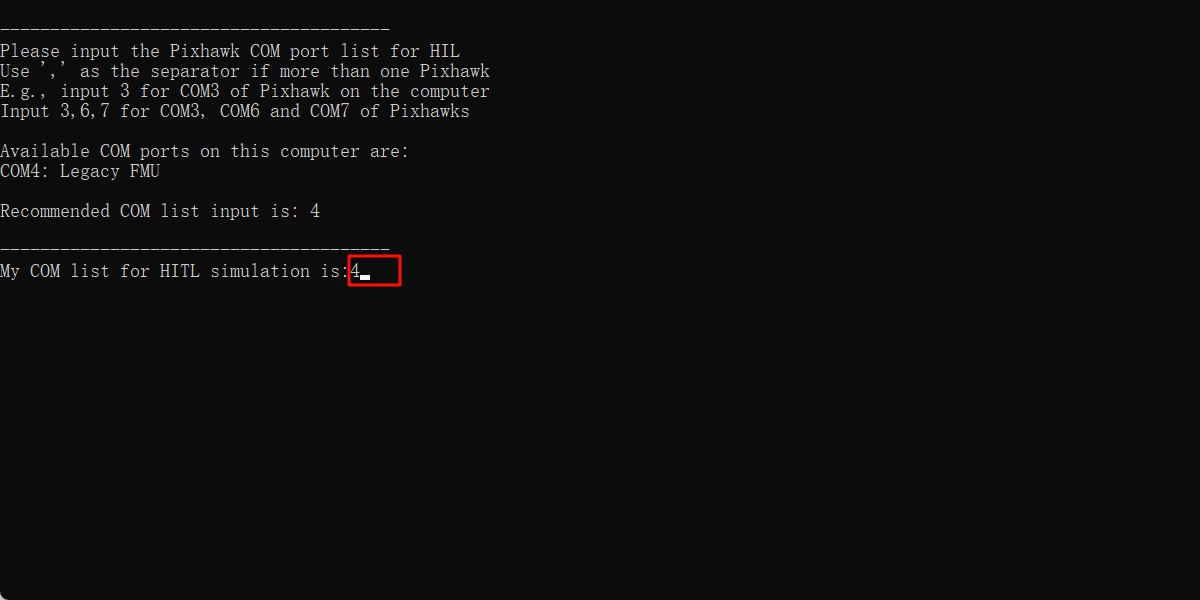
完成上述设置之后,关闭QGC。使用管理员方式运行"[安装目录]\桌面\RflyTools\HITLRun.lnk"脚本,在弹出的cmd对话框中输入飞控的端口号(如:4)。
等待CopterSim中左下角显示:PX4: GPS 3D fixed & EKF initialization finished.
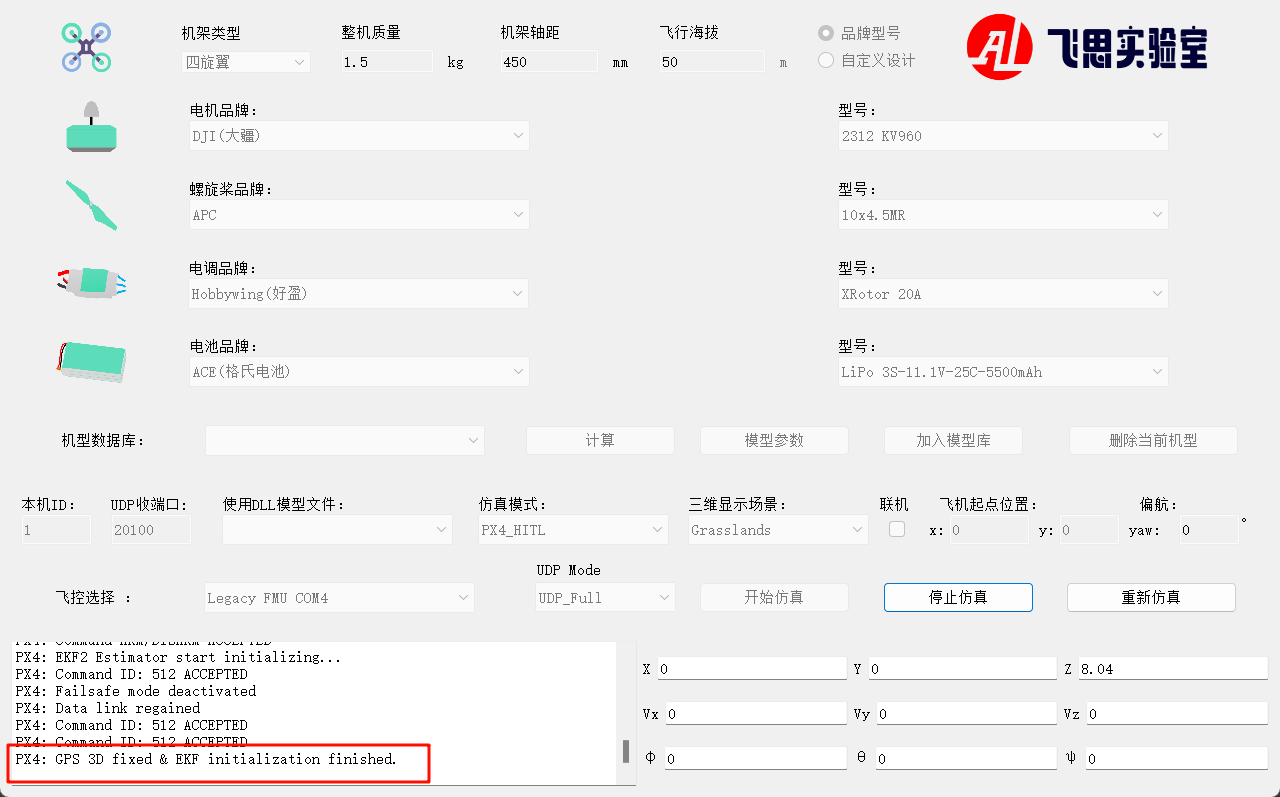

通过遥控器中CH5通道进行解锁,即可起飞,控制飞机飞行。