5.1、本章使用方法
RflySim采用基于模型设计(Model-Based Design,MBD)的思想,可用于无人系统的控制和安全测试。通过以下五个阶段:建模阶段、控制器设计阶段、软件在环仿真阶段(Software-In-the-Loop,SIL)、硬件在环仿真阶段(Hardware-In-the-Loop,HIL)和实飞测试阶段。通过MATLAB/Simulink的自动代码生成技术,控制器能够被方便地自动下载到硬件中,用于HIL仿真和实际飞行测试。
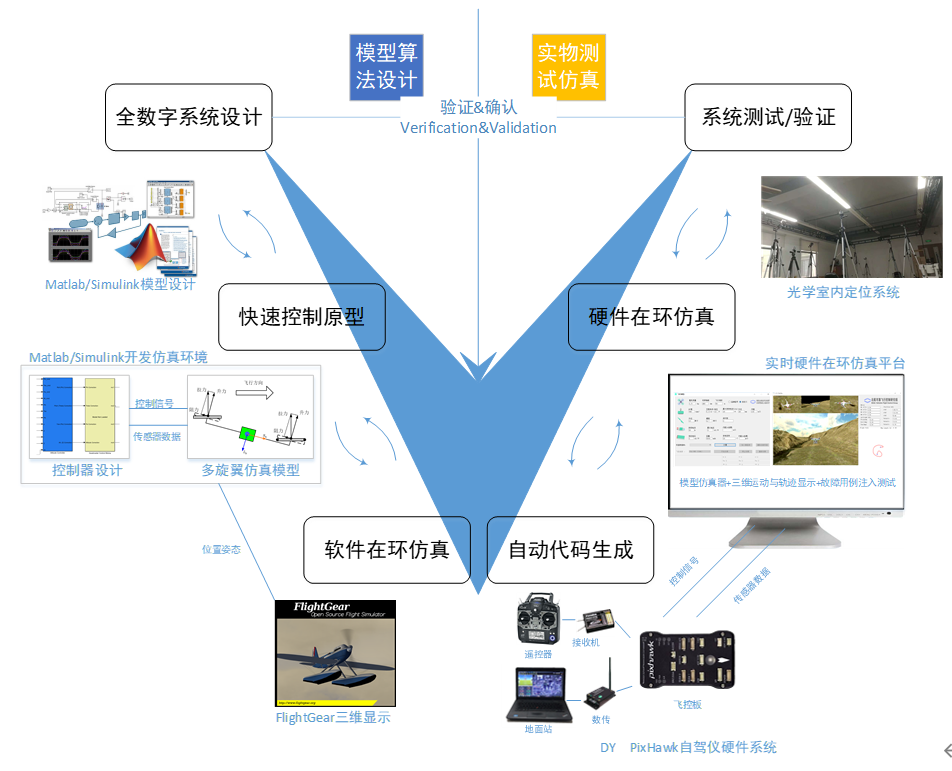
在MATLAB/Simulink 中提供了多旋翼控制器设计的相关接口,用户(初学者、学生或者工程师)可以利用自己所学知识快速进行控制器的设计与验证。在控制器设计完成后,本工具链提供代码生成与下载功能,可以将设计的 Simulink 控制算法生成 C/C++ 代码,然后将其编译进入PX4自驾仪固件中,并自动下载到自驾仪中。本工具链还提供硬件在环仿真测试功能,用户可以在真实 Pixhawk 自驾仪系统上对飞行效果进行初步模拟测试,排除实飞实验可能存在的各种问题。测试通过之后,将 Pixhawk 自驾仪装在一个多旋翼硬件系统上,就可以进行室内和室外的飞行实验,通过实验验证来评估设计控制算法的性能。
本讲核心功能介绍(Intro)文件
本讲功能介绍文档地址为:🔗[安装目录]\RflySimAPIs\5.RflySimFlyCtrl\Intro.pdf🔗
本讲API文件
本讲开发相关API接口地址为:🔗[安装目录]\RflySimAPIs\5.RflySimFlyCtrl\API.pdf🔗
本讲PPT文件
本讲内容的PPT文档的地址为:🔗[安装目录]\RflySimAPIs\5.RflySimFlyCtrl\PPT.pdf🔗
本讲所有例程文件
本讲所有例程请见Index文档,该文件的地址为:🔗[安装目录]\RflySimAPIs\5.RflySimFlyCtrl\Index.pdf🔗