10.3、本章常见问题
10.3.1、工具链的例程(使用python/matlab控制)整个开发的流程,用什么软件写的,通信过程是什么?
问题解答:
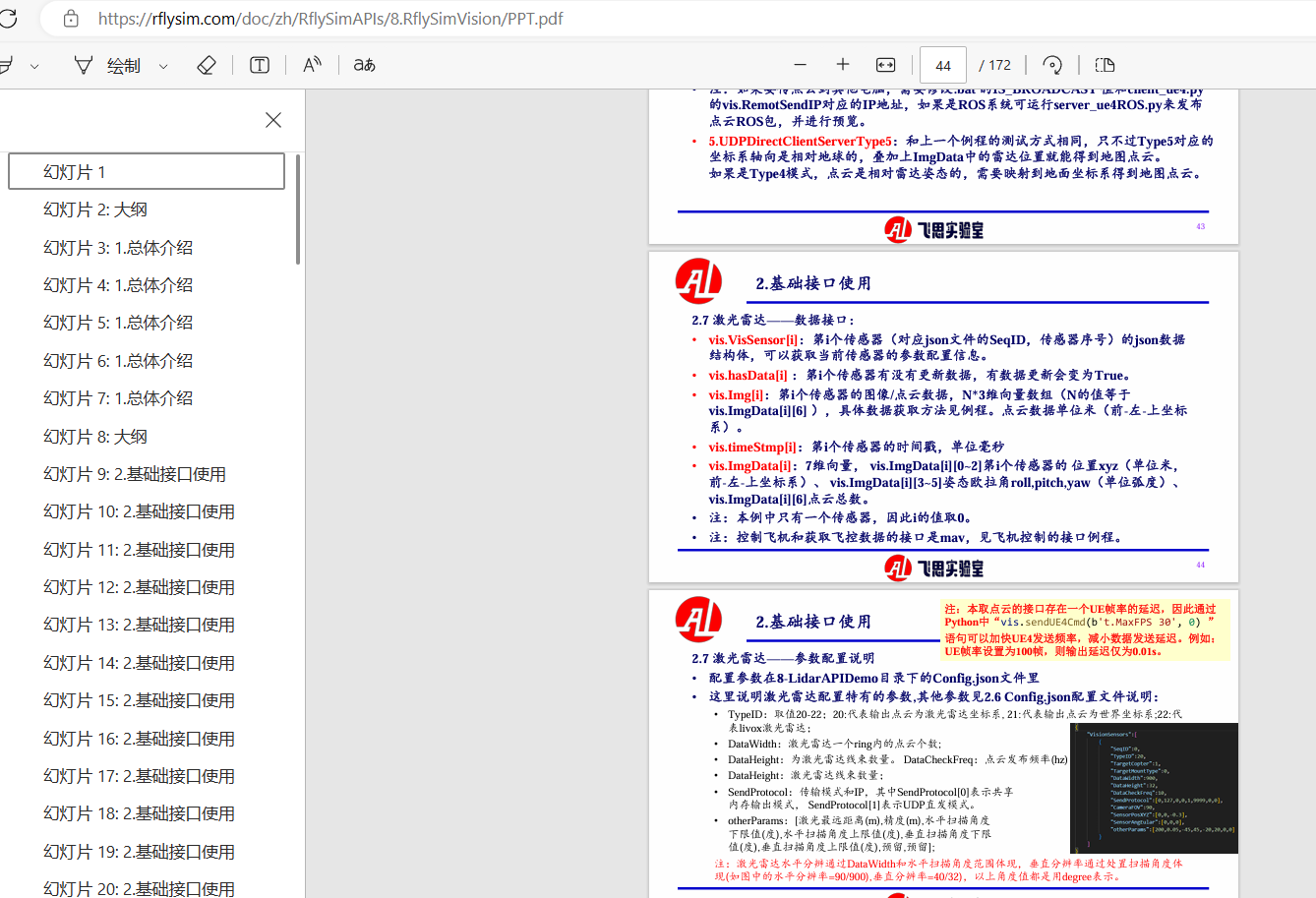
Python控制开发流程可以参考第8章PPT,MATLAB控制开发流程可以参考第10章PPT,具体路径为:[RflySim安装目录]\RflySimAPIs\8.RflySimVision\PPT.pdf🔗。🔗[RflySim安装目录]\RflySimAPIs\10.RflySimSwarm\PPT.pdf🔗
10.3.2、开发的编队算法怎么在仿真环境中做验证,编队是否支持三种机型?
问题解答:
编队支持三种机型的,具体怎么实现可参考RflySimAPIs\OtherVehicleTypes\MultiVehicleDemo\readme.pdf,本例子展示了如何实现一台电脑进行多种不同载具的SITL仿真(HITL仿真的方法可以类似),具体修改方法可参考里面修改内容实现仿真效果
多机协同测试中用python编程效果不好,给出的demo中用到的是simulink,是不是说明多机协调还是用simulink更适合。
可以参考第10章ppt 第2.3小节使用simulink控制及群里的例子,路径为:🔗[RflySim安装目录]\RflySimAPIs\10.RflySimSwarm\PPT.pdf🔗,如下图所示:

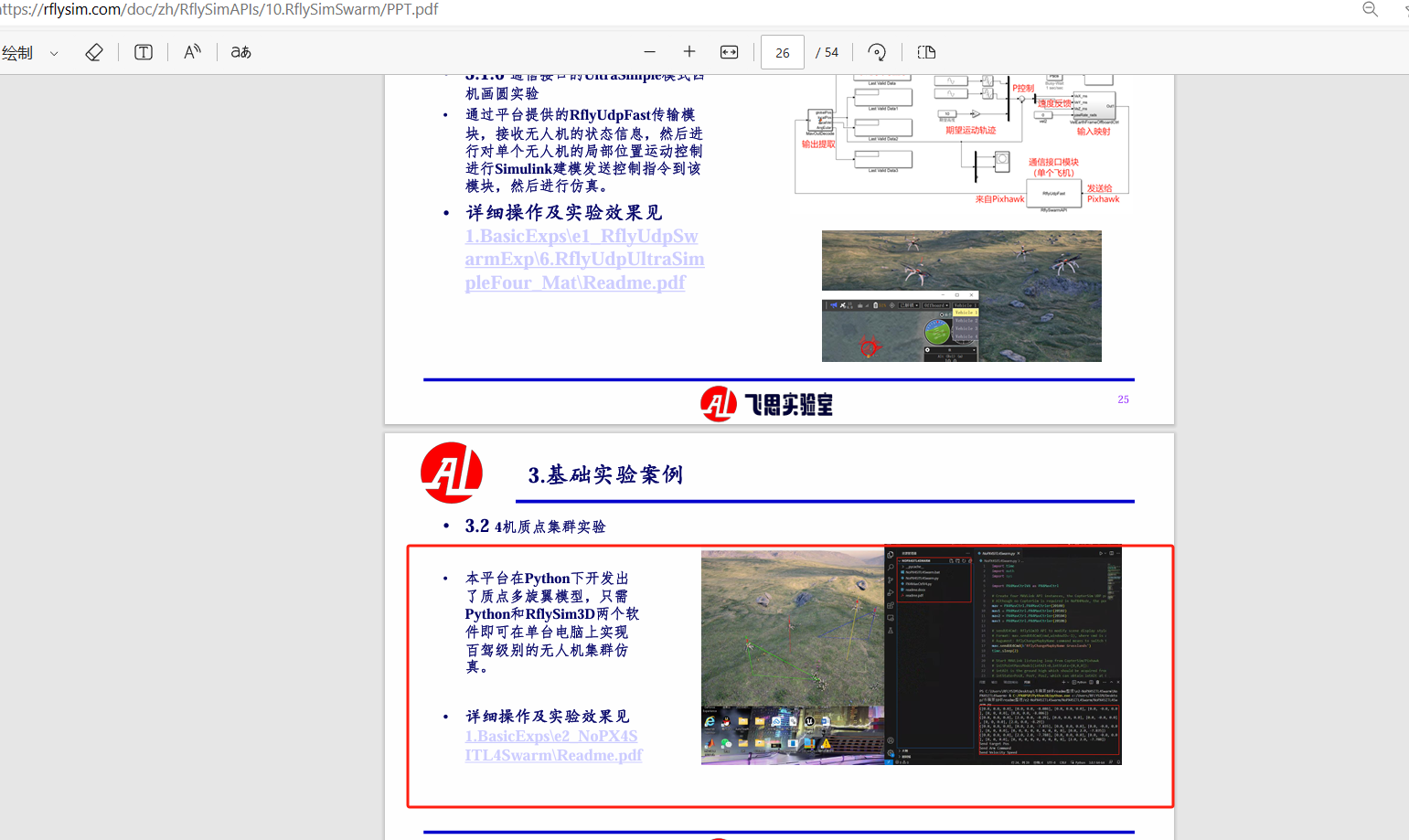
python 可以参考第10章ppt 第3.2小节,路径为:🔗[RflySim安装目录]\RflySimAPIs\10.RflySimSwarm\PPT.pdf🔗,如下图所示:
10.3.3、最近在看新版本RflySim的新功能,发现集群的一些仿真里有些文件夹似乎是缺省的,没办法跑起来,不知道是不是这个问题?
问题解答:
参考第10章PPT第2小节,路径为:🔗RflySim安装目录]\RflySimAPIs\10.RflySimSwarm\PPT.pdf🔗,如下图所示:

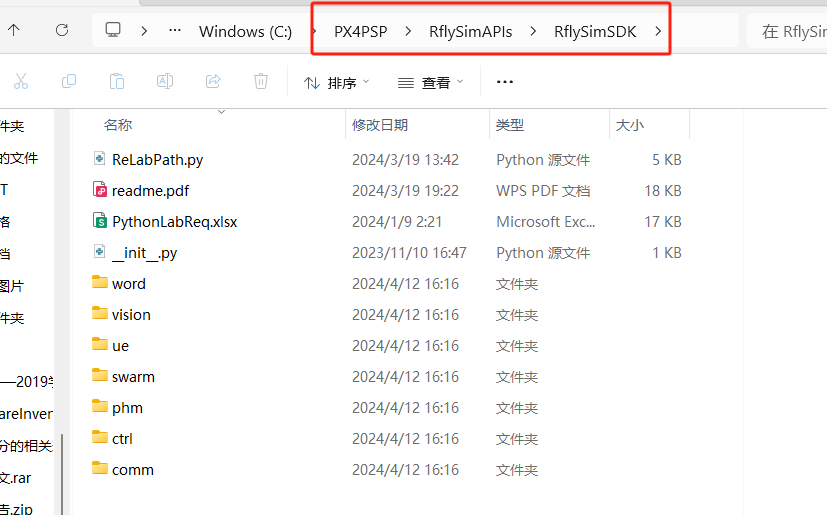
新版工具链已经将接口文件全部整理到了[RflySim安装目录]\PX4PSP\RflySimAPIs\RflySimSDK中了。如下图所示:
10.3.4、圆球避障是使用Python写的,无人机集群飞行是用simulingk写的,请问可以实现在无人机飞行过程中同时实现避障吗?有具体例程可以参考吗?也就是我们在无人机飞行的地图中如何生成障碍物模型。
问题解答:
参考第10章PPT第4章例程碰撞检测例程,具体路径为:[RflySim安装目录]/RflySimAPIs/10.RflySimSwarm/1.BasicExps/e5_CollisionExpAPI/1.CrashMonitorAPI/Readme.pdf

10.3.5、RflySim工具链免费版集群最多八架飞机吗?
问题解答:
是的,在安装完RflySim工具链后,可在:【RflySim安装目录】\RflySimAPIs\1.RflySimIntro\RflysimVersions.pdf中查看。