7.3、本章常见问题
7.3.1、在尝试了解电机或螺旋桨故障注入,遇到了问题。文件夹下要运行的python文件总需要额外的包,这个算正常吗?我要自己找还是是需要另装?看similink程序,效率故障代码似乎是直接乘以IntFloat里的参数,这样如何体现为效率故障?代码里似乎体现为故障参数表现为整数而直接与被注入故障的信号相乘,是怎么转变为效率故障的?
问题解答:
在运行Python文件时需要额外的包是很正常的情况,特别是如果你使用了一些第三方库或模块。你可以通过安装所需的包来解决这个问题。通常情况下,你可以使用Python的包管理工具(如pip)来安装缺失的包。
关于你提到的效率故障注入的问题,这个问题涉及到模拟器或仿真软件的具体实现方式。通常情况下,效率故障可以通过改变电机或螺旋桨的性能参数来模拟,例如减小电机的功率输出或提高螺旋桨的阻力。
在Simulink中,你提到的效率故障代码直接乘以IntFloat里的参数的方式,可能是模拟器或仿真软件内部实现的一种方式。这意味着模拟器会根据效率故障的参数来修改电机或螺旋桨的性能,从而影响飞行器的行为。
具体来说,如果代码中的故障参数表现为整数,并且直接与被注入故障的信号相乘,这可能意味着故障参数表示的是一个乘法因子,用来调整电机或螺旋桨的性能。例如,如果效率故障参数为0.9,则将其与电机的输出相乘,可以将电机的输出降低到原来的90%,从而模拟电机效率的下降。
总的来说,效率故障的实现方式取决于具体的仿真软件或模拟器的设计和实现方式。你需要查阅相关的文档或资料,以了解模拟器是如何将故障参数转化为实际效果的。
总而言之:工具链内包含的例程涉及的到的包,基本都不用安装了,若有需要额外安装的,直接安装就行。目前工具链里面就是这个实现的,当然您这边要是有更加新颖的方式,欢迎交流。
7.3.2、RflySim中能否加入可调风速干扰?
问题解答:
可以调,在MTALAB对应的程序可以去操作,是uav模型中的环境model
7.3.3、RflysimPHM/1.BasicExps/e2_GPSFault/Init.m,修改ModelParam_GPSSatsVisible=15,ModelParam_noiseUpperGPS=0,然后运行init.m,接着编译,生成dll。最终在QGC中并未生效的原因是什么?
问题解答:
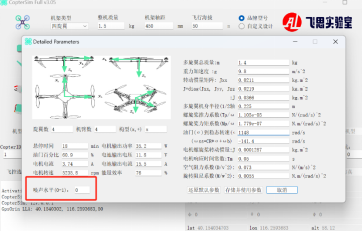
现在这一版平台,只能改总体的噪声水平,参数是封装在各个模块的mask里面的。
7.3.4、RflySim这个仿真工具有设置风速的接口吗?接口的加速度控制最快只能加到5m/s速度控制可以加到px4设置的上限,要怎么调?
问题解答:
这个你找找参数吧。应该在多旋翼角速度环的参数里面
7.3.5、RflySim支持加定位噪声吗?就是让飞机的定点不那么稳定?
问题解答:
你可以使用Simulink生成的多旋翼DLL模型,那定位噪声随便你添加。
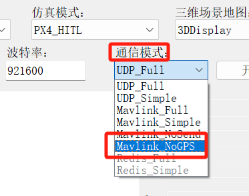
或者修改这里的全局噪声水平,另外,这里有个NoGPS模式,直接就是不会发定位信息,需要用SLAM定位后,通过mavlink发给飞机视觉定位。