第一讲:工具链安装与学习方法
1. 软件获取及安装
RflySim工具链支持在Windows平台下进行一键安装、一键代码生成、一键固件部署、一键软硬件在环仿真和快速实飞,非常方便易用。用户不需要了解飞控源码、Linux编程、C/C++编程、网络通信、飞机组装等底层知识,只需具备基础的Simulink(或Python)知识,即可快速将自己的算法经过层层验证并应用于真机上,有助于更专注于算法的开发与测试。
安装方法简介
安装包获取:https://rflysim.com/download 工具链安装方法:**🔗HowToInstall🔗
安装方法视频
从官方途径获取最新.iso的镜像(如:免费版是RflySimAdvFree-.iso,后面表示版本号),可以鼠标右键-打开方式-Windows资源管理器来加载镜像(或用解压软件解压,或用虚拟光驱加载),从而获取右图所示安装包文件夹,RflySim工具链视频版安装教程如下所示,**文字版详细安装步骤
注意事项
注意:免费版和完整版镜像可以通过填写邮箱的方式,从 https://rflysim.com/download 获取云盘下载链接。完整版下载链接和注册码请咨询service@rflysim.com。我们分享的云盘链接和密码不会变更,但里面的安装包会经常更新,因此以云盘中安装包更新的时间为版本基准。
2. 工具链使用
工具链使用方法见:🔗HowToUse🔗
3. 工具链总览
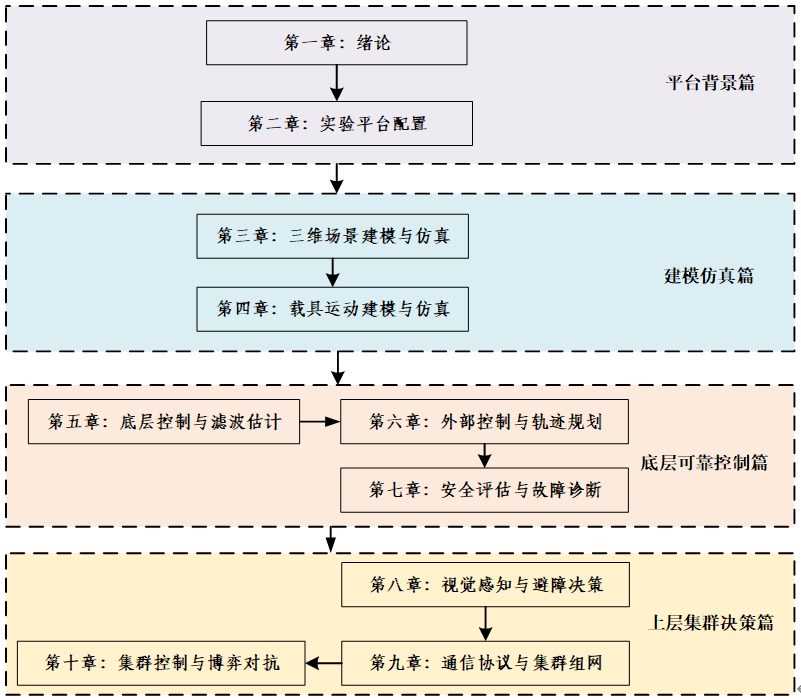
本工具链主要根据无人系统开发过程阶段将其划分为10个不同得章节。其内容包括利用RflySim对场景搭建、无人系统的动力学模型建立、底层控制、智能感知、健康评估、网络模拟、集群控制等等。其中第二章关于RflySim工具链使用上手,通过该章可以完成软件平台的安装方法和硬件平台配置。通过一二章,读者可以对研究对象和使用工具有个总体的了解,这为后续开发设计打下了基础。在第三、四章中为三维模型与场景开发,以及无人载具系统建模开发,其中前者涉及无人系统工作的环境,后者涉及无人系统的数学模型。基于第三、四章的实践,进入第五、六章中,包含底层控制开发实践涉及如何控制无人系统的动力单元,而远程控制开发实践涉及如何控制无人系统的速度等高层指令。后者涉及的无人系统是“无人系统+自动驾驶仪”的复合系统,其中自动驾仪可以用于控制无人系统的速度。远程控制开发实践多服务于高层决策。在第七章中故障注入与安全测试开发实践内容主要涉及如何设计带故障注入的无人系统模型,以及如何进行故障注入等。这部分工作可以用于测试系统的可靠性和容错能力等等。第八章中讲解了很多智能系统都离不开视觉这一信息量丰富的传感器。视觉算法开发实践内容主要涉及如何接入视觉传感器,并完成视觉输入到控制。第十章中包括集群通信组网开发实践和集群控制开发实践。集群相关工作也可以与单机相关工作进行结合,构建不同场景。🔗详情见链接🔗
整体框架如下:
4. RflySim工具链特色功能展示
一键安装
自动代码生成
软件在环仿真
硬件在环仿真
室内飞行控制
基于UE4的室内硬件在环仿真
基于视觉的一键穿环控制例程

带安全防护的真机实验
无人车的室外硬件在环仿真场景
Simulink控制集群飞机室内飞行实验
集群控制和硬件在环仿真