1.载具模型统一建模框架
整体建模框架
1.1.模型输入接口
1.1.1 飞控仿真输入接口
1.1.1.1 inPWMs(电机控制量输入)
16维执行器控制量输入,已归一化到-1到1尺度,它的数据来自飞控回传的电机控制MAVLink消息mavlink_hil_actuator_controls_t的controls,软硬件在环仿真过程中可以通过QGroundControl中Analyze Tools里的MAVLink检测功能实时查看controls变化。
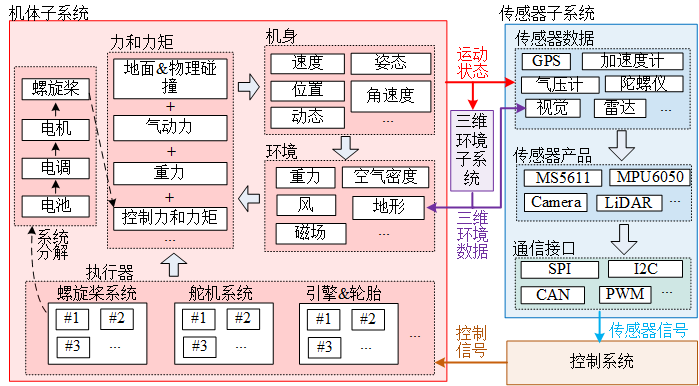
从图 0.1得知,软件在环仿真时,电机控制指令从PX4 SITL控制器通过TCP 4561系列端口以MAVLink协议发送到运动仿真模型的inPWMs接口,而硬件在环仿真时,该指令是从飞控通过串口以MAVLink协议发送到运动仿真模型的inPWMs接口。
img
1.1.1.2 inCopterData(飞控状态量输入)
inCopterData是32维double型数据,前8维存储PX4的状态,目前1-6维数据,依次为:
- l inCopterData(1):PX4的解锁标志位
- l inCopterData(2):接收到的RC频道总数。当没有可用的RC通道时,该值应为0。
- l inCopterData(3):仿真模式标志位,0:HITL,1:SITL,2:SimNoPX4。
- l inCopterData(4):CoperSim中的3D fixed标志位。
- l inCopterData(5):来自PX4的VTOL_STATE标志位。
- l inCopterData(6):来自PX4的LANDED_STATE标志位。
- 9-24维接收ch1-ch16 RC通道信号(遥控器输入),25-32维监听rfly_px4 uORB消息。
1.1.2 碰撞数据接收接口
1.1.2.1inFloatsCollision
利用inFloatsCollision实现了一个简单地物理引擎,可以根据RflySim3D回传的四周距离数据,实现碰到障碍物的回弹、碰到其他飞机便坠毁等功能(补充readme)。
1.1.2.2inCollision20d(外部碰撞数据输入)
20维double型输入,和inFloatsCollision接口功能一致,可以通过UDP网络从UE4传输,该端口为碰撞模型预留。
1.1.3 外部数据传入接口
1.1.3.1 inSILInts(整型数据输入)
8维Int32型输入,通过UDP协议获取,来自30100++2系列端口号,软硬件在环仿真时,可通过该端口向模型输入一些量;同时,该接口是实现综合模型的关键接口。
1.1.3.2 inSILFloats(浮点型数据输入)
20维float型输入,通过UDP协议获取,来自30100++2系列端口号,软硬件在环仿真时,可通过该端口向模型输入一些量;同时,该接口是实现综合模型的关键接口。
inSILInts和inSILFloats接口在CopterSim中数据结构体定义为:
struct PX4SILIntFloat{
int checksum;//1234567897
int CopterID;//飞机的ID
int inSILInts[8];//int标志位
float inSILFLoats[20];//float参数位
};
1.1.3.3 inFromUE(RflySim3D数据输入)
32维double型数据,来自三维引擎(Rflysim3D/RflySimUE5),可用于实现地面交互、碰撞引擎等需要与三维引擎进行数据交互的相关功能。
其数据结构体定义为:
struct UEToCopterDataD{
int checksum; //1234567899为校验ID
int CopterID; //发出本消息的飞机ID
double inFromUE[32]; //通过蓝图发出的数据
};
1.1.3.4 TerrainIn15d(地形交互输入)
第1维是地形高度信号,由于这里的地球固联坐标系(地面坐标系)为NED,垂直地面向下为正值。可以决定模型的初始位置高度。
- 1:地形高度(m)
- 2: haslop(0或1)
- 3:螺距(rad)
- 4:偏航(rad)
- 5: hasFric(0或1)
- 6: FrictionFactor
- 7: isMoveObj(0或1)
- 8: objVx (m/s)
- 9: objVy (m/s)
- 10: objYaw (rad)
- 11-15:预留
1.1.3.5 inCtrlExt(浮点型数据输入)
包括inCtrlExt1-inCtrlExt5系列接口,要求数据维度为28维,数据类型为float。通过UDP协议获取,来自30100++2系列端口号,软硬件在环仿真时,可通过该端口向模型输入一些量。目前主要用于故障注入。
img
1.1.3.6 inDoubCtrls(双精度浮点型数据输入)
28维double型数据输入,接收来自UDP 30100++2系列端口的数据,主要用于大场景下的综合模型仿真,其数据结构体定义为:
struct DllInDoubCtrls{
int checksum;//校验码1234567897
int CopterID; // 飞机的ID
double inDoubCtrls[28];//28维的double型输入
};
1.1.3.7 inSIL28d(双精度浮点数据输入)
28维double型输入,和inSILIntFloats接口功能一致。
1.2.模型输出接口
1.2.1 飞控仿真输出接口
1.2.1.1 HILSensor30d(传感器接口集合)
该输出信号是模型发送给飞控的各种传感器数据的集合,对应了MAVLink的mavlink_hil_sensor_t消息。输出信号中包括了加速度传感器的加速度值、陀螺仪传感器的角速度值、磁罗盘传感器的磁场值,气压和空速传感器的气压值等。
struct MavHILSensor {
uint64_t time_usec; /*< 时间戳 (微秒,同步到UNIX时间或自系统启动后)*/
float xacc; /*< X轴加速度 (米/秒^2)*/
float yacc; /*< Y轴加速度 (米/秒^2)*/
float zacc; /*< Z轴加速度 (米/秒^2)*/
float xgyro; /*< X轴角速度 (弧度/秒)*/
float ygyro; /*< Y轴角速度 (弧度/秒)*/
float zgyro; /*< Z轴角速度 (弧度/秒)*/
float xmag; /*< X轴磁场强度 (高斯)*/
float ymag; /*< Y轴磁场强度 (高斯)*/
float zmag; /*< Z轴磁场强度 (高斯)*/
float abs_pressure; /*< 绝对气压 (毫巴)*/
float diff_pressure; /*< 差分气压 (风速) (毫巴)*/
float pressure_alt; /*< 基于气压计算的高度*/
float temperature; /*< 温度 (摄氏度)*/
uint32_t fields_updated; /*< 更新字段的位掩码,位0 = xacc,位12: 温度,位31: 在仿真中执行了姿态/位置/速度等的完全重置。*/
};
// Bit 1-15: 由上述MAVLink结构定义
// Bit 16-30: 保留未来使用
1.2.1.2 HILGPS30d(GPS接口)
该输出信号是模型发送给飞控的GPS数据值,它对应了MAVLink消息的mavlink_hil_gps_t结构体。输出信号中包含了经纬高、水平竖直精度、地速、北东地的速度、偏航角、定位状态和卫星数量等数据。
需要注意的是,这些传感器的值在仿真时由平台模型提供,在真机飞行时由真实传感器芯片提供。从图 1得知,软件在环仿真时,传感器和GPS数据分别是从运动仿真模型的MavHILSensor、MavHILGPS接口发出、以MAVLink协议的形式通过TCP 4561系列端口发送到PX4 SITL控制器的,而硬件在环仿真时,这些数据是通过串口发送到飞控的。
struct MavHILGPS {
uint64_t time_usec; /*< 时间戳 (微秒,自UNIX纪元以来或自系统启动以来)*/
int32_t lat; /*< 纬度 (WGS84),单位为十百万分之一度*/
int32_t lon; /*< 经度 (WGS84),单位为十百万分之一度*/
int32_t alt; /*< 高度 (AMSL,非WGS84),单位为千分之一米 (向上为正)*/
uint16_t eph; /*< GPS水平位置精度衰减 (HDOP),单位为厘米 (米*100)。如果未知,设置为65535*/
uint16_t epv; /*< GPS垂直位置精度衰减 (VDOP),单位为厘米 (米*100)。如果未知,设置为65535*/
uint16_t vel; /*< GPS地面速度,单位为厘米/秒。如果未知,设置为65535*/
int16_t vn; /*< GPS速度,单位为厘米/秒,北向,在地球固定的NED坐标系中*/
int16_t ve; /*< GPS速度,单位为厘米/秒,东向,在地球固定的NED坐标系中*/
int16_t vd; /*< GPS速度,单位为厘米/秒,向下,在地球固定的NED坐标系中*/
uint16_t cog; /*< 地面航向 (非航首航向,而是移动方向),单位为百分之一度,范围0.0至359.99度。如果未知,设置为65535*/
uint8_t fix_type; /*< 定位类型,0-1: 无定位,2: 二维定位,3: 三维定位。除非此字段至少为2,否则某些应用程序不会使用此字段的值。*/
uint8_t satellites_visible; /*< 可见卫星数量。如果未知,设置为255*/
};
// Bit 1-13: 由上述MAVLink结构定义
// Bit 14-30: 保留未来使用
1.2.1.1 ExtToPX4(自定义uORB数据输出)
16维float型数据,以串口的方式发送给PX4的uORB消息rfly_ext,用于传输其他传感器或必要数据给飞控(补充readme)。
1.2.2 仿真数据输出接口
1.2.2.1 VehileInfo60d(真实仿真数据输出)
该输出信号是模型发送给RflySim3D的真实仿真数据,是平滑的理想值,这些数据可用于Simulink下的飞控与模型进行软件仿真测试。由于模型真值在真机实验时是不可获取的,只能用PX4自驾仪的状态估计值(存在延迟、噪声和干扰),这就导致Simulink控制器往PX4在环仿真和真机实验时效果变差,需要进行调整。
struct MavVehileStateInfo {
int copterID; // 无人机ID
int vehicleType; // 无人机类型
double runnedTime; // 当前时间戳,单位为秒
float VelE[3]; // NED坐标系中无人机在地球坐标系下的速度(米/秒),分别为北向、东向和下向速度
float PosE[3]; // NED坐标系中无人机在地球坐标系下的位置(米),分别为北向、东向和下向位置
float AngEuler[3]; // 无人机的欧拉角(弧度),分别为滚转、俯仰和偏航角
float AngQuatern[4]; // 无人机的姿态四元数,提供了另一种表示姿态的方式
float MotorRPMS[8]; // 各电机的转速(RPM)
float AccB[3]; // 无人机在机体坐标系中的加速度(米/秒²),分别为X、Y、Z方向
float RateB[3]; // 无人机在机体坐标系中的角速度(弧度/秒),分别为X、Y、Z方向
double PosGPS[3]; // 无人机的GPS位置,包括经度、纬度(度)和高度(米)
};
// Bit 1-33: 由上述MAVLink结构定义
// Bit 34-60: 保留未来使用
1.2.2.2 outCopterData(自定义日志输出)
32维double型,里面的内容可自定义发送数据。发往本接口的数据,一方面会写入到本地的log日志中(在C:\PX4PSP\CopterSim下新建CopterSim*.csv,才会开始记录*号飞机的数据,注意这里*要换成飞机的ID)。另一方方面,本数据会通过UDP传输到30101系列端口(补充readme)。
1.2.2.3 ExtToUE4(自定义显示数据输出)
16维double型数据,通过20100系列端口发送给RflySim3D作为第9-24维执行器控制消息显示(补充readme)。
1.3 实时参数修改接口—FaultParamsAPI
1.3.1 FaultParamAPI.FaultInParams(故障注入参数修改接口)
1.3.2 FaultParamAPI.InitInParams(参数初始化接口)
1.3.3 FaultParamAPI.DynModiParams(参数动态修改接口)
| 实现例程 | "C:\PX4PSP\RflySimAPIs\4.RflySimModel\3.CustExps\e0_AdvApiExps\5.ParamAPI\3.DynModiParams\Readme.pdf" | | -----— | ---------------------------------------------------------— |
2.通用Simulink建模模块
2.1.6DOF模块
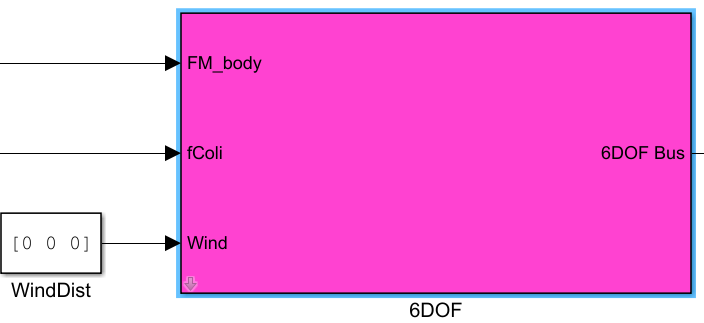
6DOF模块
| 功能 | 该模块中包括了简易的环境模型和基于四元数的刚体六自由度模型。简易环境模型模拟了重力对无人系统飞行产生的影响;刚体六自由度模型用于描述无人载具运动时的姿态和位置变化 |
| 详细介绍 | 6DOF模块 |
2.2.传感器输出模块(SensorOutput)
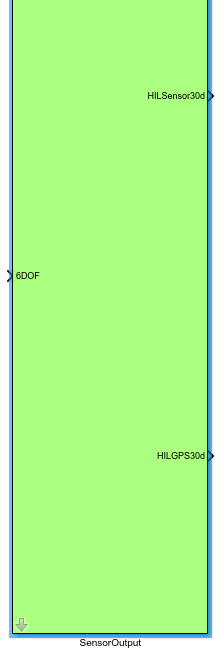
image-20240709164201355
2.3.三维显示输出模块(3DOutput)
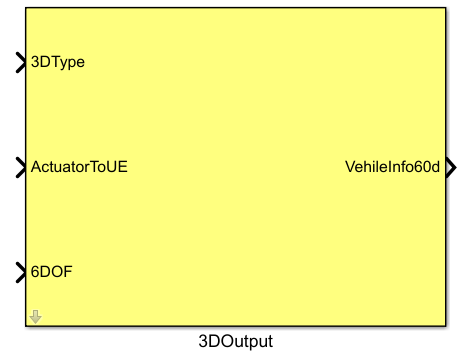
image-20240709164221296
2.4.地面模型
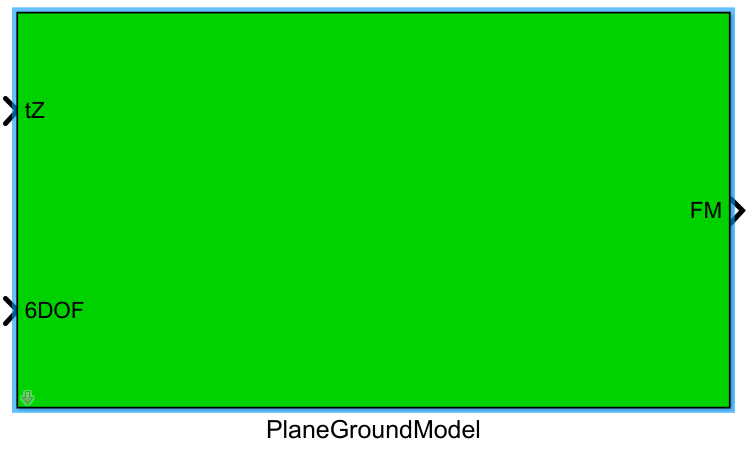
image-20240709164845884
2.5.碰撞模型
2.6.多旋翼电机响应模块
image-20240710094456092
2.7.多旋翼力和力矩计算
image-20240710095710808
3.通用Gazebo移植模块
3.1.电调模块单元
ESC_ALL(外层)
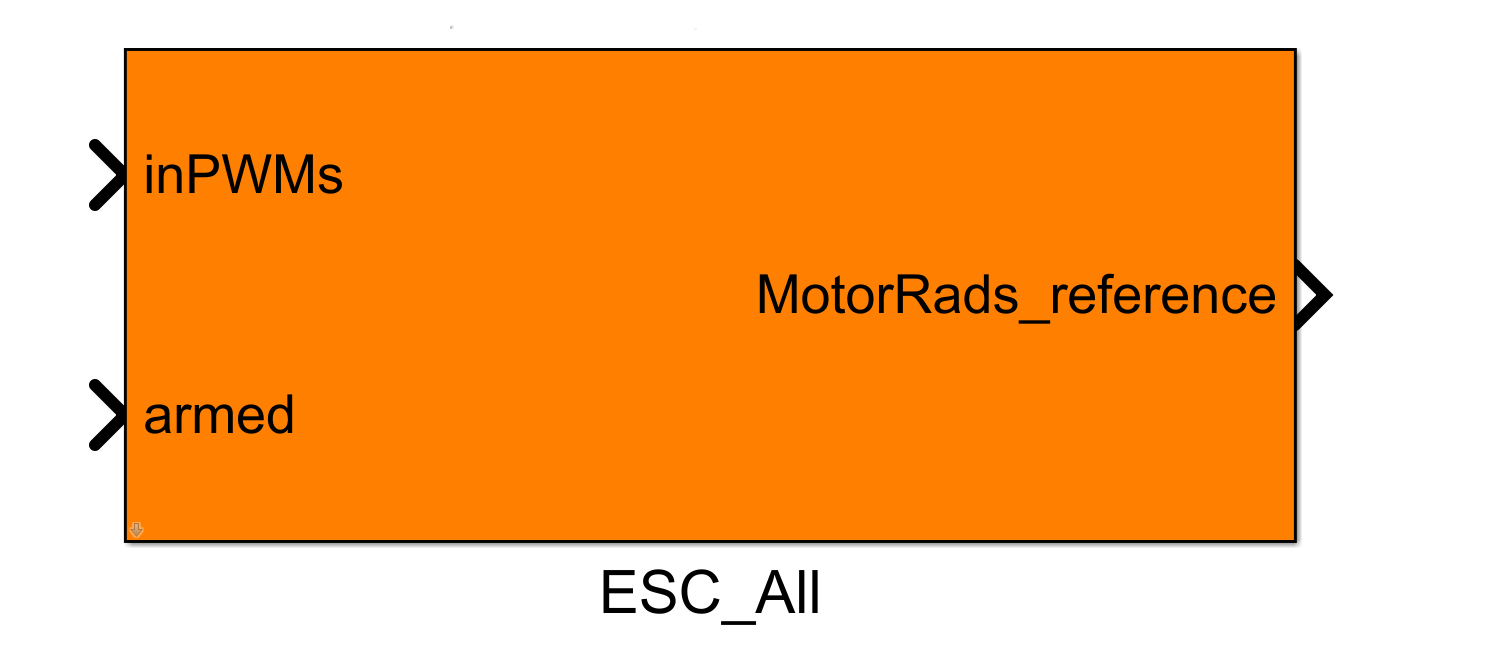
| 功能 | 该模块将inPWMs的8维控制信号经过映射、单位处理,得到相应的期望控制信号ControlRef,其中包含Velocity速度控制(电机)与Position位置控制(舵面)两种类型的信号。根据inCopterData的外部使能标志位输入确定激活其内部的哪些模块 |
| 详细介绍 | ESC_ALL |
ESC(内层)
3.2.受控动力模块单元
MOTOR_ALL(外层)
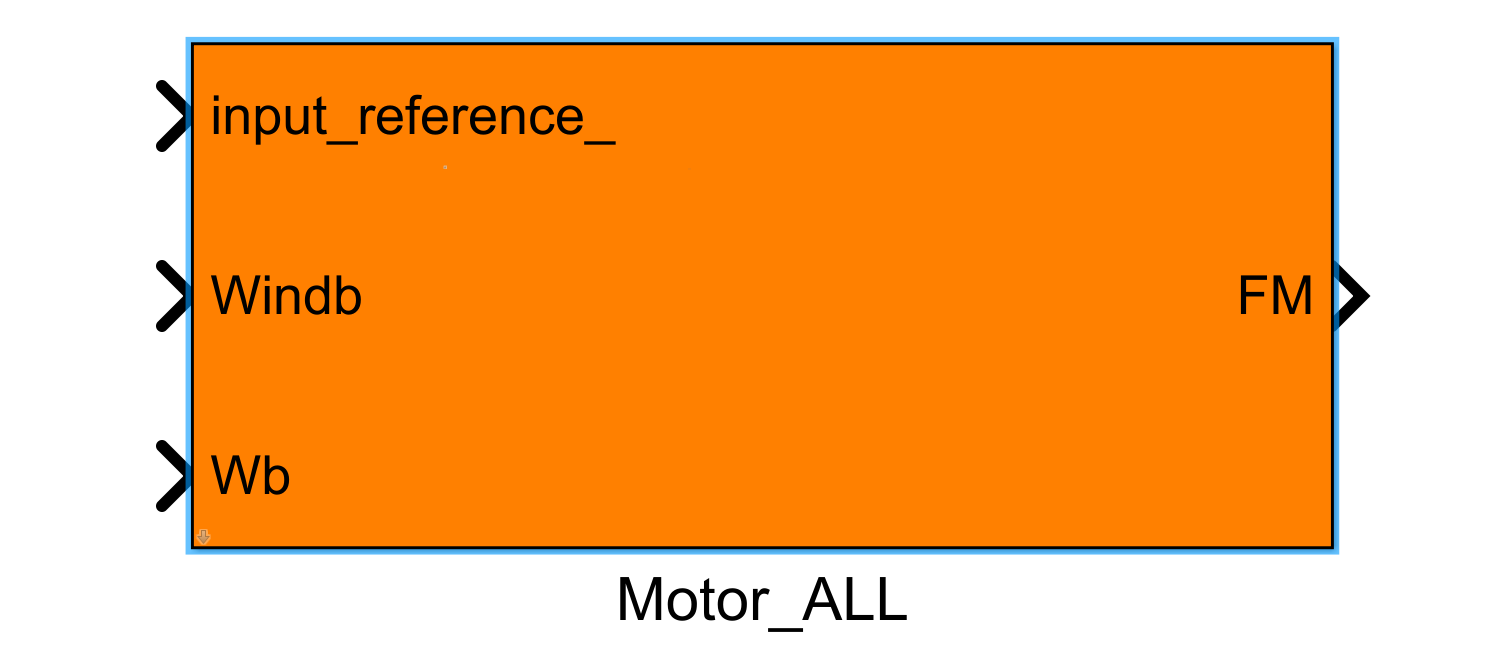
image-20240710150733701
MOTOR(内层)
3.3.飞机升阻力模块单元
LIFTDRAG_ALL(外层)
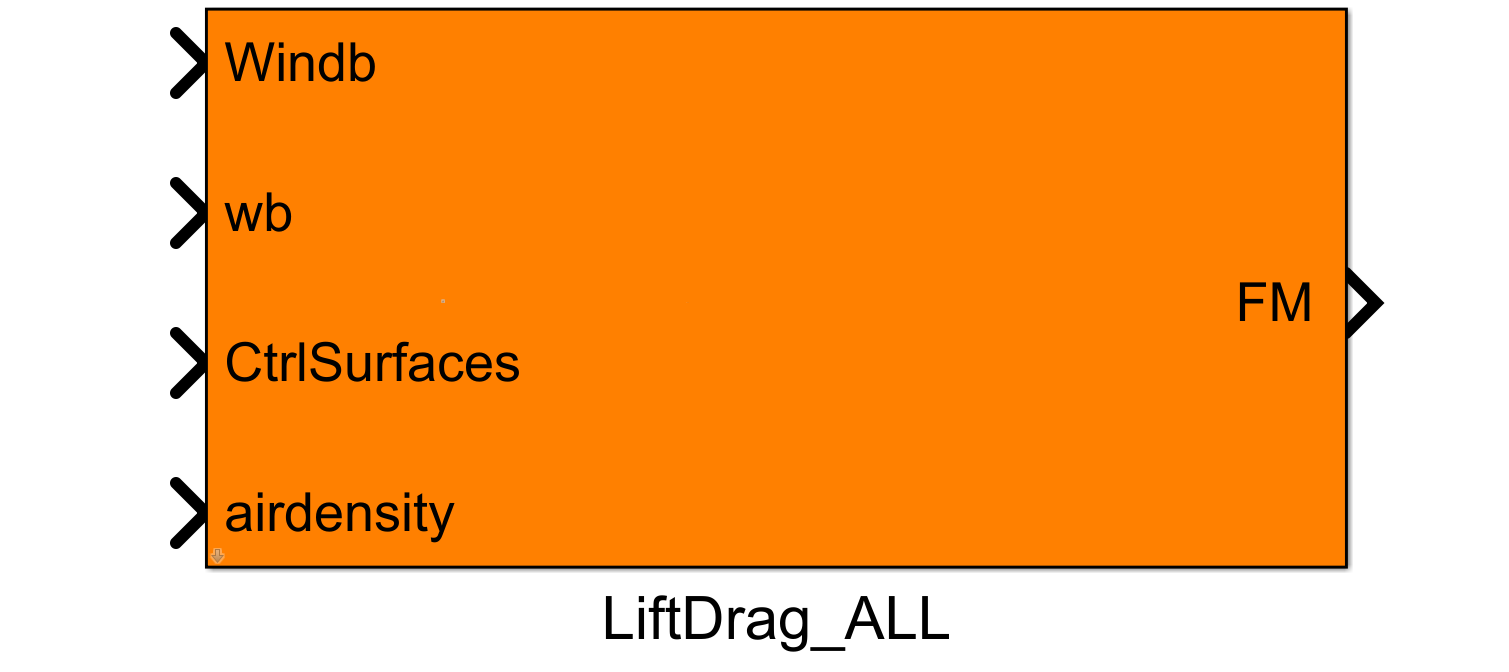
image-20240710150757477
LIFTDRAG(内层)
4.不同载具模型的自定义模块
4.1.建模框架下不同载具模型的区别
控制信号处理
力和力矩计算
环境模型
4.2.基于Simulink标准模块的模型
固定翼
无人车
高精度垂直起降飞机
4.3.基于Gazebo移植模块的模型
垂直起降飞机
水下无人艇
4.4.其它
直升机
基于动力系统辨识的四旋翼模型
高精度拖车模型
综合模型