|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
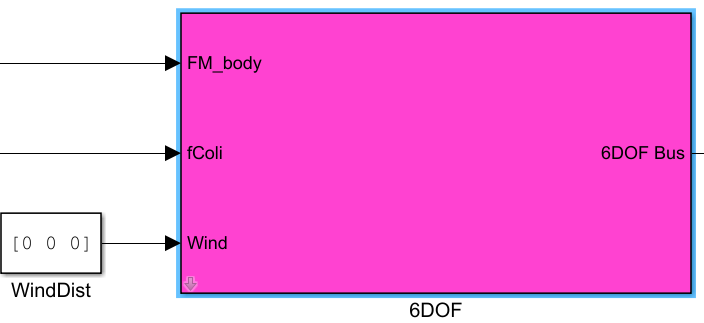
| 功能 | 该模块中包括了简易的环境模型和基于四元数的刚体六自由度模型。简易环境模型模拟了重力对无人系统飞行产生的影响;刚体六自由度模型用于描述无人载具运动时的姿态和位置变化 |
|---|---|
| 参数 | |
| Init_PosE | 3维向量,站心坐标系(常为NED)下的载具初始位置,单位米 |
| Init_VelB | 3维向量,机体坐标系下的载具xyz速度向量,单位m/s |
| Init_AngEuler | 3维向量,机体坐标系下载具初始姿态,单位弧度(rad) |
| Init_RateB | 3维向量,机体坐标系下的载具绕xyz轴的角速度向量,单位rad/s |
| Param_uavMass | 载具质量,单位为kg |
| Param_uavJ | 3*3的对角矩阵,载具的转动惯量矩阵,主对角线元素为机体系xyz三个主轴的转动惯量,单位kg.m^2 |
| Param_GPSLatLong | 2维向量,地图GPS原点的纬度和经度,单位度。 |
| Param_envAltitude | 地图GPS原点的海拔高度,竖直向下为正,高于海平面填负值,单位米。注意:由于Simulink使用的地球大气模型不支持海平面以下的输入,ModelParam_envAltitude取值必须为负。 |
| 输入 | |
| FM_body | 6维向量,机体坐标系下载具所受合力与合力矩拼接在一起,由力和力矩模块输出 |
| fColi | 6维向量,机体坐标系下碰撞和摩擦产生的力和力矩拼接在一起,由碰撞模块和地面模块输出,若无对应模块则用0代替 |
| Wind | 3维向量,站心坐标系(常为NED)下的风速,由风干扰模块输出,若无对应模块则用0代替 |
| 输出 | |
| 6DOF Bus | 将简易环境模型和刚体六自由度模型的输出封装在总线中 |
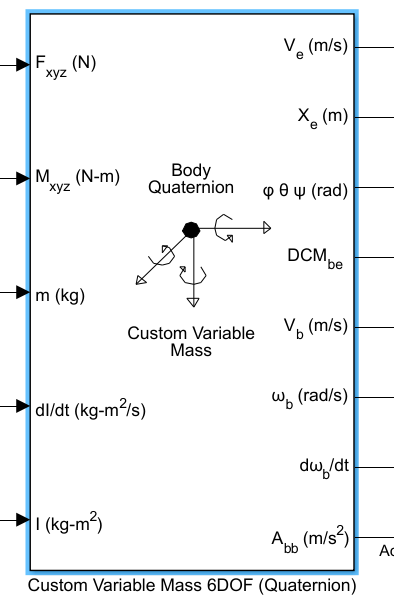
| 功能 | 刚体六自由度模型用于描述无人载具运动时的姿态和位置及其变化(包括速度和加速度) |
|---|---|
| 参数 | |
| Init_PosE | 3维向量,站心坐标系(常为NED)下的载具初始位置,单位米 |
| Init_VelB | 3维向量,机体坐标系下的载具xyz速度向量,单位m/s |
| Init_AngEuler | 3维向量,机体坐标系下载具初始姿态,单位弧度(rad) |
| Init_RateB | 3维向量,机体坐标系下的载具绕xyz轴的角速度向量,单位rad/s |
| 输入 | |
| Fb | 3维向量,机体坐标系下载具所受合力,单位N |
| Mb | 3维向量,机体坐标系下载具所受合力矩,单位N.m |
| Param_uavMass | 载具质量,单位为kg |
| dm | 3*3的矩阵,载具的惯性变化率矩阵,默认为0矩阵,单位kg.m^2/s |
| Param_uavJ | 3*3的对角矩阵,载具的转动惯量矩阵,主对角线元素为机体系xyz三个主轴的转动惯量,单位kg.m^2 |
| 输出 | |
| Ve | 3维向量, |
| Xe | 3维向量 |
| Eular | 3维向量 |
| DCM | 3*3的方向余弦矩阵 |
| Vb | 3维向量 |
| wb | 3维向量 |
| dwb/dt | 3维向量 |
| AccB | 3维向量 |
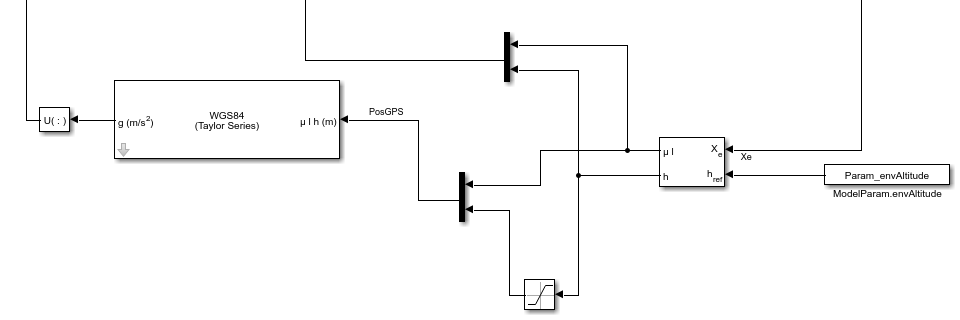
| 功能 | 该简易环境模型进行了载具位置的GPS坐标换算并模拟了重力对无人系统飞行产生的影响 |
|---|---|
| 参数 | |
| Param_GPSLatLong | 2维向量,地图GPS原点的纬度和经度,单位度。 |
| Param_envAltitude | 地图GPS原点的海拔高度,竖直向下为正,高于海平面填负值,单位米。注意:由于Simulink使用的地球大气模型不支持海平面以下的输入,ModelParam_envAltitude取值必须为负。 |
| 输入 | |
| Xe | 3维向量,站心坐标系(这里是NED)下的载具实时位置坐标,由六自由度机身子系统模块输出 |
| 输出 | |
| PosGPS | 3维向量,大地坐标系(LLA,经纬高)下的载具实时位置坐标(单位:经纬度均为度,高度为m),结合地图GPS原点对NED下的载具实时位置做了一个逆投变换 |
| gravity | 3维向量,特定地点(PosGPS)的地球重力加速度(单位m/s^2),利用世界大地测量系统( WGS 84基准椭球体下建立的测度 )计算。 |