|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
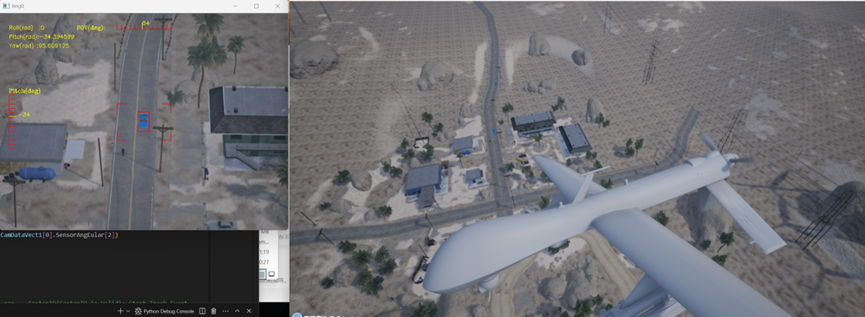
提供吊舱摄像头的实时图像流,支持对动态场景的高分辨率观测。
吊舱可实现 俯仰(Pitch) 和 偏航(Yaw) 方向的旋转控制,支持灵活调整观测角度。
支持光学变倍功能,适合远距离目标的精细观察。
提供高精度的距离测量能力,支持环境建模与目标测距。
**功能按键说明**:
环境监控与观测: 用于无人机的环境监测任务,例如自然灾害监控、地形侦查等。
目标跟踪: 适用于自动化的动态目标跟踪,例如车辆或行人的轨迹捕获。
工业检测: 可用于设施巡检,提供高精度影像和测距数据支持。
测绘建模: 在无人机测绘任务中,用于细化地形和目标数据的获取。
配置文件添加传感器 以下是配置文件 Config.json 的示例代码,用于添加 吊舱传感器:
Python 调用传感器接口 取图显示相关代码:
实时更新相机参数(位置、焦距、角度、装载飞机和形式):
例程链接
大疆 Zenmuse 系列吊舱
Flir Vue 系列红外热成像吊舱
Gremsy T7 吊舱云台
Sony Airpeak Gimbal
| 参数名称 | 取值范围 | 含义 |
|---|---|---|
| TargetMountType | 0: 固定载具上(相对几何中心);1: 固定载具上 (相对底部中心);2: 固定地面上(监控);3:相对地面坐标系的吊舱相机,固定飞机上,但相机姿态不随飞机变化(地面坐标系);4:将传感器附加到另外一个传感器上 | 决定传感器的所属载体对象及安装方式。 |
| TargetCopter | 目标传感器ID(默认为0);目标实体对象 ID (默认 1) | 决定传感器安装方式后,选择目标测量对象ID。传感器固定在载具或地面上时,该值对应目标载具或其它实体对象的CopterID;传感器固定在其它传感器上时,该值对应目标传感器**SeqID**。 |
| SensorPosXYZ | [x, y, z] (单位:米) | 相对于传感器所属载体对象的安装位置。 |
| EulerOrQuat | 0: 欧拉角;1: 四元数 | 选择安装姿态的表示方式。 |
| SensorAngEular | [roll, pitch, yaw] (单位:角度) | 安装姿态,欧拉角方式表示,单位角度。 |
| SensorAngQuat | [q0, q1, q2, q3] | 安装姿态,四元数方式表示。 |
| 参数名称 | 取值范围 | 含义 |
|---|---|---|
| SendProtocol | [mode, IP, port, …] | 配置数据传输协议,支持共享内存和 UDP。 |
| SendProtocol[0] | 0: 共享内存;1: UDP 压缩传输 | 选择传输方式。 |
| SendProtocol[5] | 端口号 | 数据传输的目标端口号。 |
| 参数名称 | 示例值 | 说明 |
|---|---|---|
| SeqID | 0 | 吊舱传感器的唯一编号,若为 0 则自动递增排序。 |
| TypeID | 9 | 吊舱类型编号,表示该传感器为仿真吊舱。 |
| DataWidth | 640 | 吊舱摄像头的图像宽度(像素),影响输出图像的分辨率。 |
| DataHeight | 480 | 吊舱摄像头的图像高度(像素),影响输出图像的分辨率。 |
| DataCheckFreq | 30 Hz | 图像数据的刷新频率,单位为 Hz。 |
| CameraFOV | 90 度 | 摄像头的水平视场角(Field of View),单位为度。 |
| otherParams[0] | -90 | Pitch 最小角度(度),定义吊舱在俯仰方向上的下限。 |
| otherParams[1] | 20 | Pitch 最大角度(度),定义吊舱在俯仰方向上的上限。 |
| otherParams[2] | 120 | Pitch 角速度(度/秒),控制俯仰方向的旋转速度。 |
| otherParams[3] | 120 | Yaw 角速度(度/秒),控制偏航方向的旋转速度。 |
| otherParams[4] | 4 | 光学变倍参数,定义吊舱摄像头的变焦倍数。 |
| otherParams[5] | 200 | 测距最大距离(米),定义吊舱摄像头的最大探测范围。 |