|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
Livox 激光雷达采用独特的非重复扫描方式,视场覆盖率将随时间推移而显著提高,可减小视场内物体被漏检的概率。 当积分时间为 0.1 s 秒时,mid-40 的视场覆盖率与 32 线机械式激光雷达相近;当积分时间为 0.5 s 秒时,mid-40 的视场覆盖率与 64 线机械式激光雷达相当。而随着积分时间增加,且覆盖率随积分时间增加而接近 100。
传感器输出
应用场景
配置文件添加传感器 以下是配置文件 Config.json 的示例代码,用于添加激光雷达传感器:
注意:点云数据我们最终是以 int16 格式发布,这个值是与 otherParams[0]参数是耦合的。
例如,x_float 是激光雷达测量得到的点云的 x 轴浮点数值(单位米,数值小于otherParams[0]),则 x_int = x_float / otherParams[0] * 32767。因此,拿到点云数据后,需要再根据最远距离 otherParams[0],做一个逆向映射:x_float = x_int / 32767 * otherParams[0].
Python 调用传感器接口 取图显示相关代码:
例程链接
| 参数名称 | 取值范围 | 含义 |
|---|---|---|
| TargetMountType | 0: 固定载具上(相对几何中心);1: 固定载具上 (相对底部中心);2: 固定地面上(监控);3:相对地面坐标系的吊舱相机,固定飞机上,但相机姿态不随飞机变化(地面坐标系);4:将传感器附加到另外一个传感器上 | 决定传感器的所属载体对象及安装方式。 |
| TargetCopter | 目标传感器ID(默认为0)或目标实体对象 ID (默认 1) | 决定传感器安装方式后,选择目标测量对象ID。传感器固定在载具或地面上时,该值对应目标载具或其它实体对象的CopterID;传感器固定在其它传感器上时,该值对应目标传感器**SeqID**。 |
| SensorPosXYZ | [x, y, z] (单位:米) | 相对于传感器所属载体对象的安装位置。 |
| EulerOrQuat | 0: 欧拉角;1: 四元数 | 选择安装姿态的表示方式。 |
| SensorAngEular | [roll, pitch, yaw] | 安装姿态,欧拉角方式表示,单位角度。 |
| SensorAngQuat | [q0, q1, q2, q3] | 安装姿态,四元数方式表示。 |
| 参数名称 | 取值范围 | 含义 |
|---|---|---|
| SendProtocol | [mode, IP, port, …] | 配置数据传输协议,支持共享内存和 UDP。 |
| SendProtocol[0] | 0: 共享内存;1: UDP 压缩传输 | 选择传输方式。 |
| SendProtocol[5] | 端口号 | 数据传输的目标端口号。 |
| 参数名称 | 示例值 | 说明 |
|---|---|---|
| SeqID | 0 | 每个传感器在配置文件中的唯一编号,若为 0 则自动递增排序。 |
| TypeID | 22 | 传感器类型,22 表示 Livox MID40 激光雷达。 |
| TargetCopter | 1 | 传感器绑定的无人机编号,默认为绑定 1 号无人机。 |
| TargetMountType | 0 | 安装方式,0 表示固定在无人机几何中心。 |
| DataWidth | 250 | 表示半边花瓣(扫描区域)内点的数量,越大点云密度越高,但计算资源需求也增加。 |
| DataHeight | 40 | 表示一帧点云包含的半边花瓣数量,控制垂直方向点云的分布。 |
| DataCheckFreq | 10 Hz | 点云更新频率,单位为 Hz,表示每秒点云发布的帧数。 |
| CameraFOV | 70.432 度 | 扫描范围的水平视场角,等于半边花瓣长度的两倍,单位为度。 |
| otherParams[0] | 600 | 激光雷达的最大测距范围,单位为米。点云超出该范围的数据将被裁剪。 |
| otherParams[1] | 2.956 | 圆弧的弦高,控制单个花瓣的垂直高度,单位为度。 |
| otherParams[2] | 1.4 | 横向缩放比例,控制点云在 x 轴上的拉伸效果,默认为 1.4。 |
| otherParams[3] | 1.18 | 纵向曲率,调整“8 字形”花瓣的纵向曲率,值越大曲率越大,点云越集中于中间区域。 |
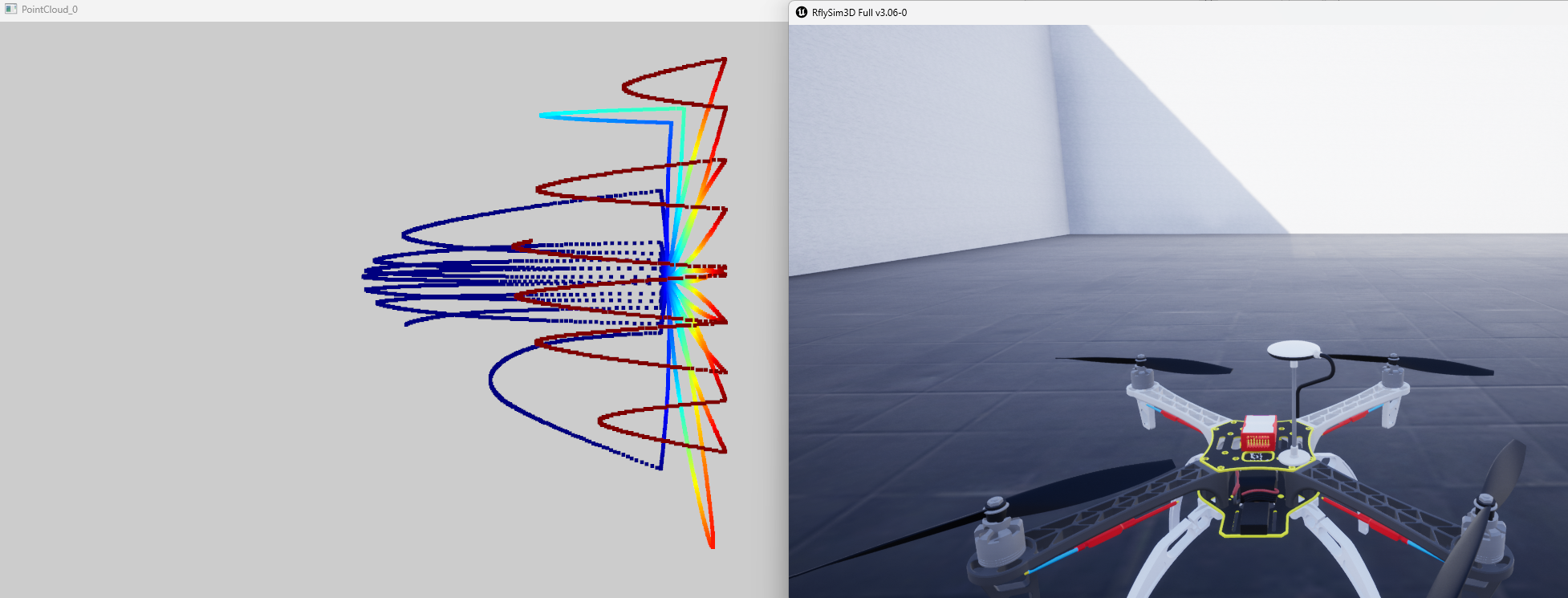
| otherParams[4] | 10 | 由几个“8”字组成一朵完整的花,值越大点云分布越密集,扫描间隔越小,覆盖率越高。几个8 字(一个八字是两片对称花瓣,4 段弧)组成一朵花,如下图所示是大疆激光雷达0.1s 的数据,也就是10 个八字(20 片花瓣)组成了一朵花。这样otherParams[4]=10。也就是说,相邻两个花瓣之间的角度为180/10=18 度。注意:为了保证扫描的均匀性,这几个花瓣并不是从左到右依次扫描的,扫描顺序是生成一个0 到N-1 的随机数列表,以此顺序来扫描这朵花的花瓣。 |
| otherParams[5] | 5 | 几 朵花 0 .1 s 2 0 个花瓣 1 0 个 8 字 组成一个图形。 也就是说,对于上图的 花的图像,需要均匀插入若干朵花,让他们进一步细分。这里默认值为 5 ,也就是说五朵花组成了一个图形。<br/注:这里的花朵是依次扫描的,如果每朵花有 2 0 个 花瓣 1 0 个 8 字 则每两个花瓣之间夹角是 3 60/20=18 度 ,每 5 朵花组成一个图形的话 ,那 相邻两朵花的 偏转 为1 8/ 5= 3.6 度。 |
| otherParams[6] | 1 | 每扫描完一 个图形 ,都会新引入一个随机 错位角度 ,让两个图案 不会完全重叠。 随机错位角度 为 rand (0, 1 )* otherParams[6] |