|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
传感器输出
应用场景
**无人机监控与侦察**:
**自动驾驶感知系统**:
**虚拟现实与全景建模**:
**工业巡检**:
配置文件添加传感器
以下是配置文件 Config.json 的示例代码,用于添加鱼眼相机:
**参数说明**:
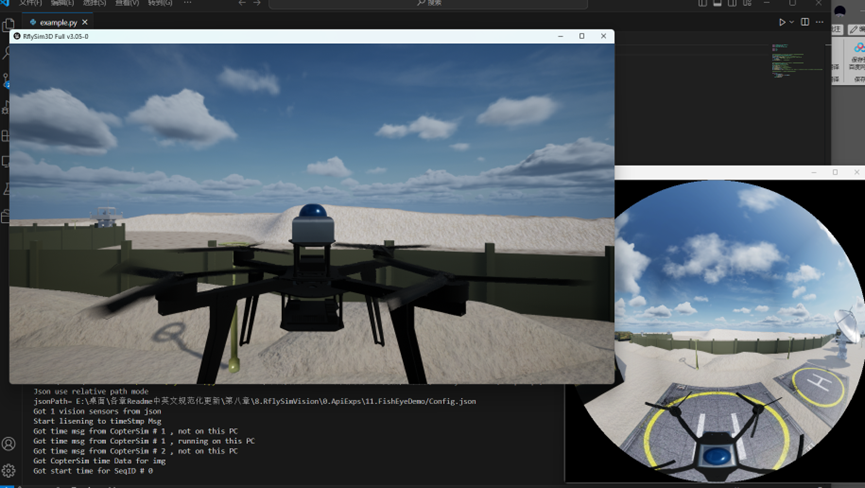
Python 调用传感器接口 取图显示相关代码:
例程链接
**GoPro Max**:提供 360° 全景拍摄,适用于户外活动和运动场景。
**Insta360 ONE R**:模块化设计,可切换鱼眼镜头模块,支持高分辨率全景视频录制。
**FLIR Blackfly S Fisheye Camera**:工业级鱼眼相机,适用于机器人视觉和机器学习。
**Ricoh Theta Z1**:全景拍摄相机,支持高质量 360° 照片和视频输出。
| 参数名称 | 取值范围 | 含义 |
|---|---|---|
| TargetMountType | 0: 固定载具上(相对几何中心);1: 固定载具上 (相对底部中心);2: 固定地面上(监控);3:相对地面坐标系的吊舱相机,固定飞机上,但相机姿态不随飞机变化(地面坐标系);4:将传感器附加到另外一个传感器上 | 决定传感器的所属载体对象及安装方式。 |
| TargetCopter | 目标传感器ID(默认为0)或目标实体对象 ID (默认 1) | 决定传感器安装方式后,选择目标测量对象ID。传感器固定在载具或地面上时,该值对应目标载具或其它实体对象的CopterID;传感器固定在其它传感器上时,该值对应目标传感器**SeqID**。 |
| SensorPosXYZ | [x, y, z] (单位:米) | 相对于传感器所属载体对象的安装位置。 |
| EulerOrQuat | 0: 欧拉角;1: 四元数 | 选择安装姿态的表示方式。 |
| SensorAngEular | [roll, pitch, yaw] | 安装姿态,欧拉角方式表示,单位角度。 |
| SensorAngQuat | [q0, q1, q2, q3] | 安装姿态,四元数方式表示。 |
| 参数名称 | 取值范围 | 含义 |
|---|---|---|
| SendProtocol | [mode, IP, port, …] | 配置数据传输协议,支持共享内存和 UDP。 |
| SendProtocol[0] | 0: 共享内存;1: UDP 压缩传输 | 选择传输方式。 |
| SendProtocol[5] | 端口号 | 数据传输的目标端口号。 |
| 技术参数 | 配置值 | 说明 |
|---|---|---|
| SeqID | 0 | 每个传感器的唯一编号。 |
| TypeID | 8 | 传感器类型编号,8 表示鱼眼相机。 |
| DataHeight | 640 | 图像垂直分辨率,越高图像越清晰。 |
| DataWidth | 640 | 图像水平分辨率,越高图像越清晰。 |
| DataCheckFreq | 30 Hz | 数据刷新频率,默认 30 Hz,性能消耗较大。 |
| CameraFOV | 200° | 视场角范围,推荐 180°~270°。 |
| otherParams[0] | 512 | CubeMap 的投影尺寸,影响全景投影的图像分辨率。 |
[](https://www.paulbourke.net/dome/fish2/)
鱼眼相机的**接缝**是指在将多幅鱼眼图像或立方体贴图面去畸变后拼接到同一个视图时,邻接图像块之间由于投影、视角或曝光差异而产生的可见分界线或融合伪影 (sigport.org, en.wikipedia.org)。这些接缝常出现在立方体贴图各面交界处(如四色网格之间的边界)或双鱼眼镜头拼接区域(如两个圆形投影的重叠带) (sigport.org)。主要成因包括:
下方以四个典型示例说明鱼眼相机接缝的位置与形态 (en.wikipedia.org):
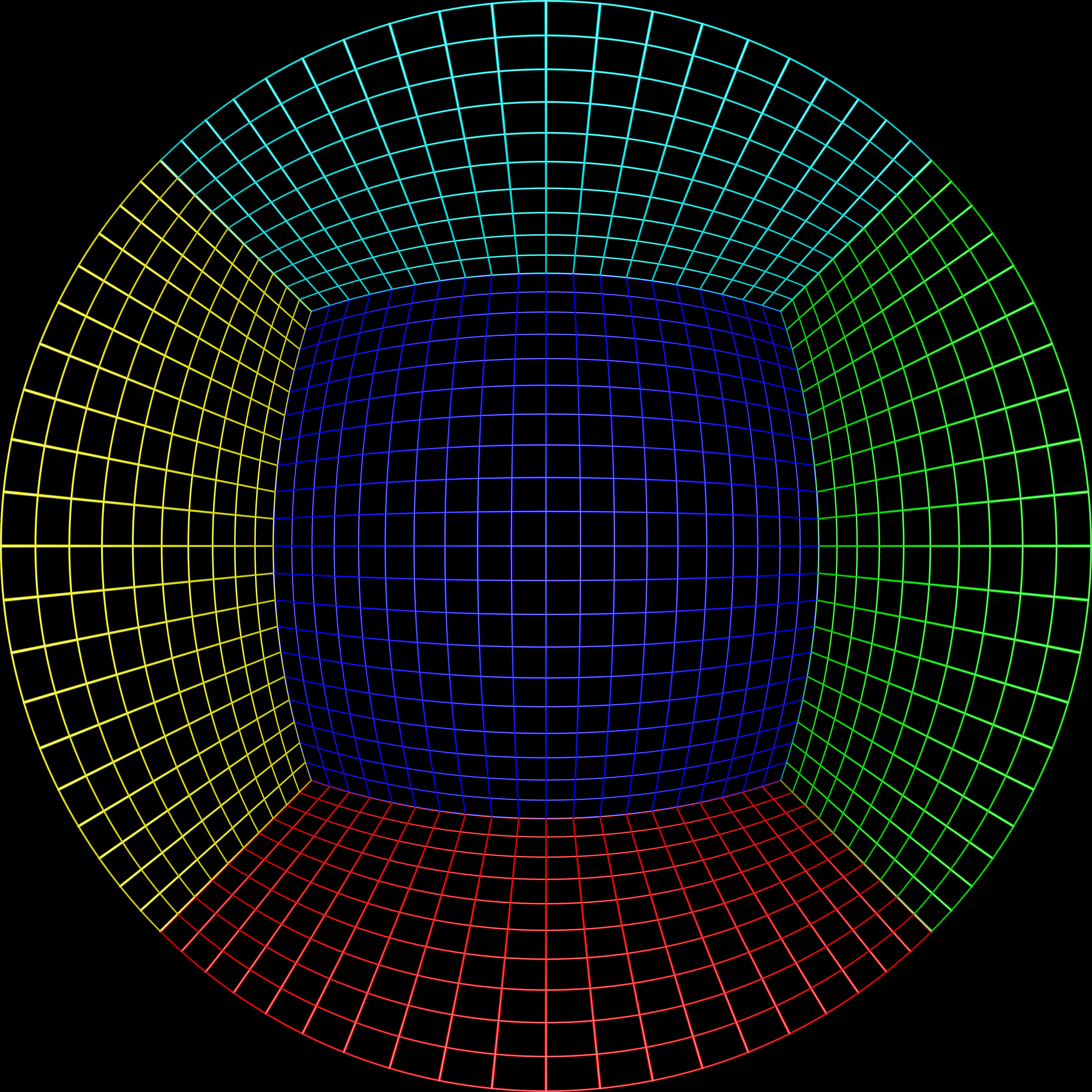
立方体展开十字形

双鱼眼重叠拼接
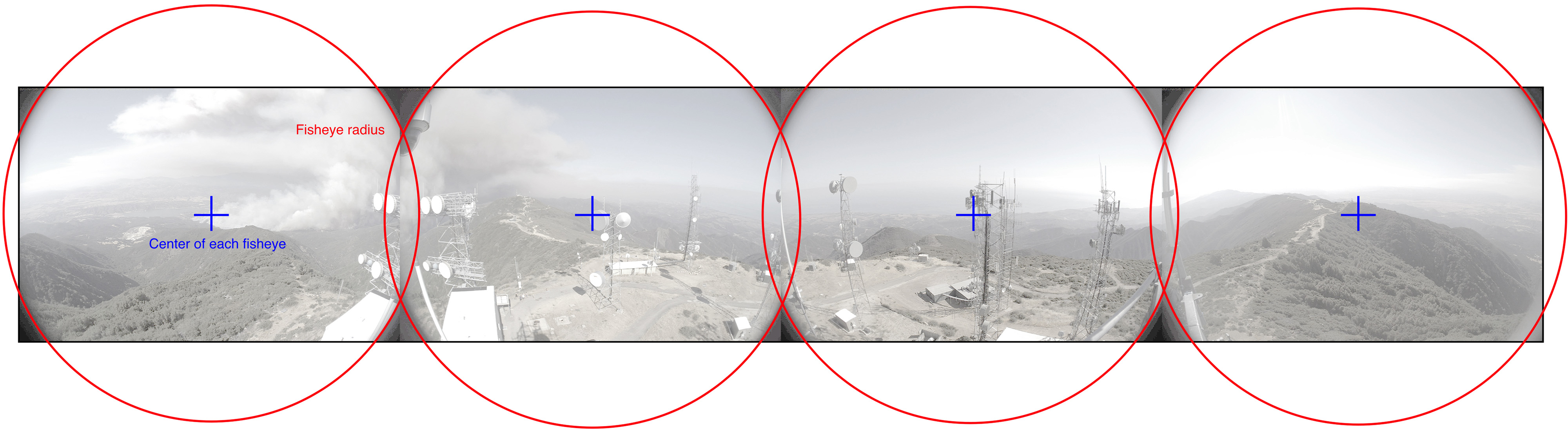
自然场景鱼眼拼接

以上示例展示了接缝在不同拼接方式下的典型表现。要实现无缝全景,需要结合缝隙查找(Seam Finding)、多频带融合(Multi-band Blending)和曝光补偿等算法进行后处理,以抹平这些可见分界。
新增一个后处理体积按照网页内容操作Camera360v2 解决渲染有接缝问题 UE5.4 - 哔哩哔哩
在新创建的 Post Process Volume 的 Details 面板中,按以下类别展开并设置:
将 Bloom 彻底关闭,避免亮斑或光晕伪影 dev.epicgames.com。
手动曝光保证每帧亮度一致,不受环境光变化影响 dev.epicgames.comdev.epicgames.com。
关闭色差,消除分色边缘 dev.epicgames.com。
关闭晕映与锐化,确保画面平滑自然 dev.epicgames.com。
在 Directional Light 组件的 Details → Light 中:
彻底关闭光束效果,避免光芒射线干扰全景 dev.epicgames.com。
在同一 Directional Light 的 Avanced → Light → Volumetric Scattering Intensity 设置为 0.0
关闭光源对体积雾的贡献,避免雾中光照渲染 dev.epicgames.com。
完成以上四步后,即可实现:
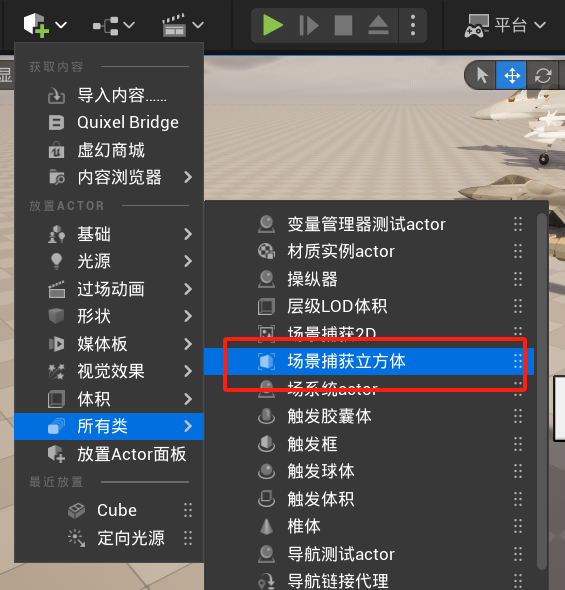
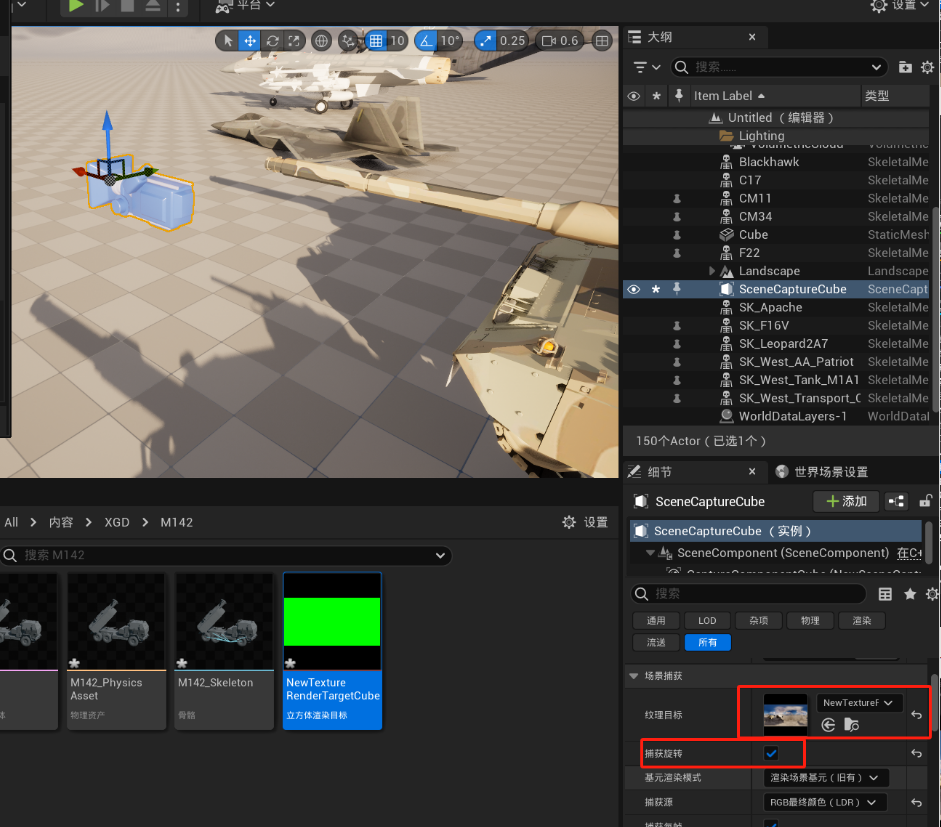
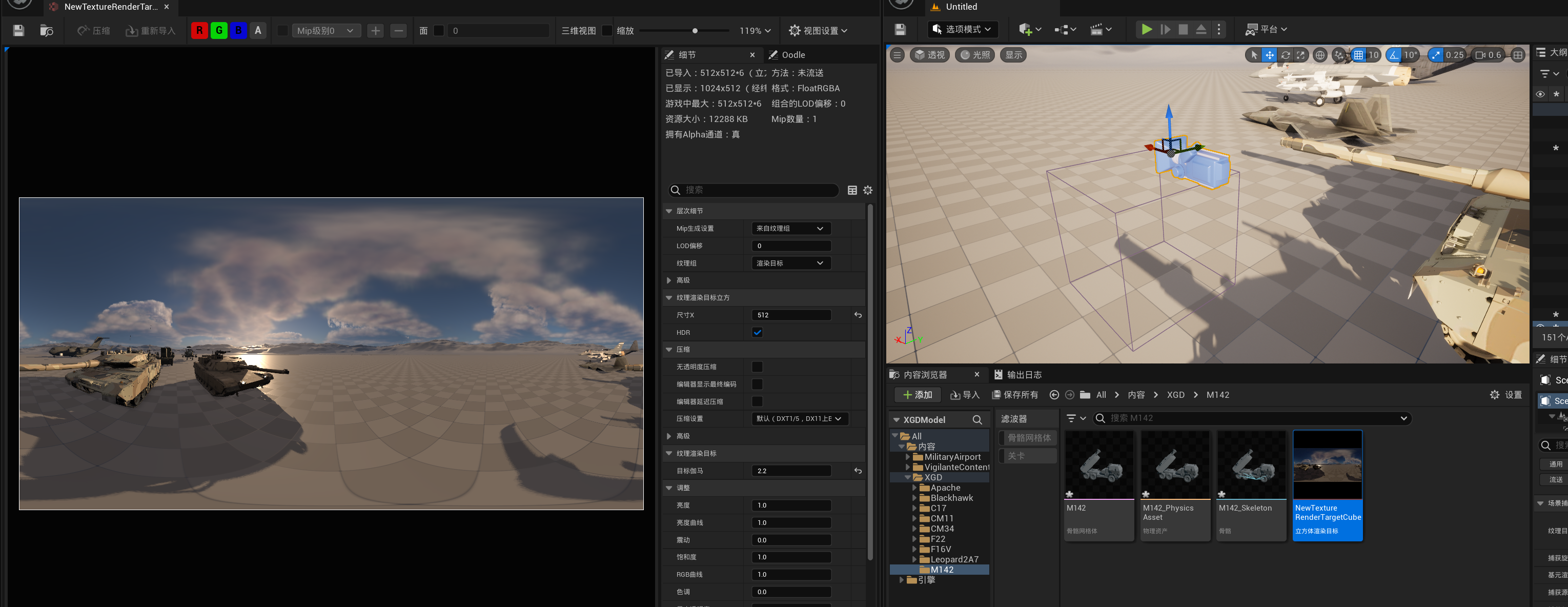
场景打包之前可以在场景里面添加一个场景捕获立方体(场景捕获组件),然后内容浏览器新增一个立方体渲染目标纹理,把这个纹理给到这个相机,在场景中移动相机,直接看纹理有没有接缝