|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
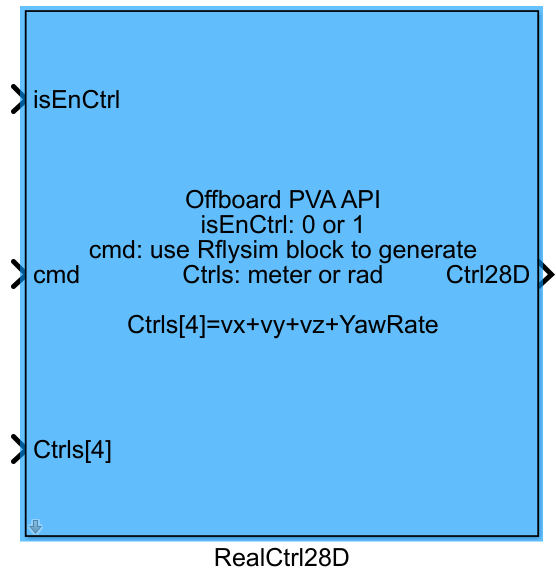
| 功能 | 用于将控制指令和控制量打包成可以通信的格式 |
|---|---|
| 参数 | |
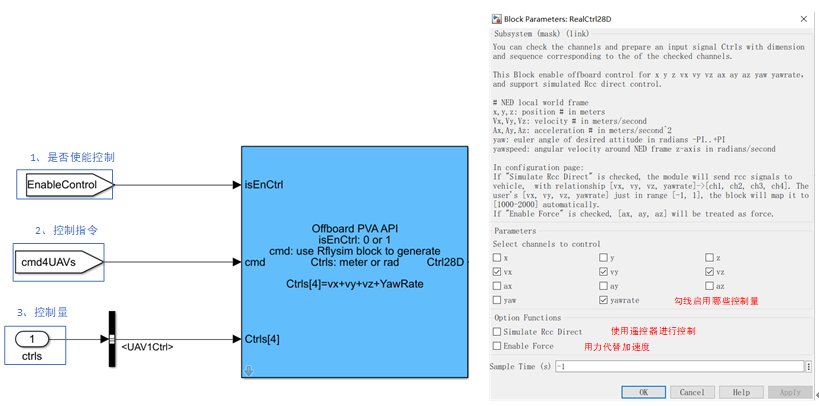
| Select channels to control | - 选择要控制的通道,包括以下选项: 1. x, y, z: 位置(单位:米)。 2. vx, vy, vz: 速度(单位:米/秒)。 3. ax, ay, az: 加速度(单位:米/秒²)。 4. yaw: 期望的欧拉角(单位:弧度,范围:-π到+π)。 5. yawspeed: 绕NED框架Z轴的角速度(单位:弧度/秒)。 |
| Simulate Rcc Direct | - 勾选后,模块将发送RCC信号给飞行器,信号关系为:[vx, vy, vz, yawspeed] -> [ch1, ch2, ch3, ch4]。用户的[vx, vy, vz, yawspeed]范围在[-1, 1]之间,模块会自动将其映射到[1000-2000]。 |
| Enable Force | - 勾选后,ax, ay, az将被视为力(而非加速度)。 |
| Sample Time (s) | - 模块的采样时间,单位为秒。 |
| 输入 | |
| isEnCtrl是否使能控制 | 该信号可由“模式控制”模块生成EnableControl,也可自定义。当没有使能控制时该模块所有输出信号都为0。当该模块用作位置控制时,可能需要自定义isEnCtrl而不是使用“模式控制”模块生成的EnableControl。因为在进入Offboard并解锁后,设为位置0可能让飞机产生运动,这在室内多机时一定有飞机位置不为0。这种情况下,需要在解锁后就使能控制并将飞机当前位置作为指令传递给飞机。所以,在集群控制时建议优先使用速度控制模式,这样上层控制程序更方便操作。 |
| cmd控制指令 | 该模块一定来自于“模式控制”模块。该指令传入“Offboard PVA”模块后,会进一步加工,例如会添加MAVLINK协议中SendPositionTarget相关的标志。 |
| Ctrls四维控制输入 | 四维控制输入将会被如何解析取决于该模块配置界面的设置。双击该模块可进入配置界面。虽然理论上可以任意勾选各个选项,但为了保持无人机稳定,勾选选项是有约束的。无人机的X、Y、Z和偏航四个自由度中,每个自由度都必须勾选一个量。也就是说,x、vx、ax中必须勾选一个,类似的Y和Z也是如此。对于偏航,必须在yaw和yawrate中选择一个勾选。如果“Simulate Rcc Direct”被勾选,那么四维控制信号将被解析为模拟遥控器信号。用户的输入仍然是[-1, 1],模块会自动映射到1000-2000的PWM波。当使能加速度控制时,如果“Enable Force”被勾选,那么加速度将被解析为力。 |
| 输出 | 28维double型向量,将控制数据输出给通信模块(如RflyUdpMavlink) |
最后,总结一下该模块的使用要点:1)根据需要在配置界面中勾选合适的控制指令,无人机的X、Y、Z和偏航四个自由度中,每个自由度都必须勾选一个量。2)isEnCtrl在位置控制多机时需要自定义,以保证正确的行为。
**功能**:
**使用场景**:
使用示例:[安装目录]\RflySimAPIs\10.RflySimSwarm\1.BasicExps\e1_RflyUdpSwarmExp\index.html