image-20240807183157849
| 功能 | 发送力和力矩(归一化后的)控制量actuator_controls_0消息(或PX4 v1.14版本中的vehicle_torque/thrust_setpoint),并经过PX4自带的Mixer混控器计算电机转速后,驱动给CopterSim的inPWMs输入,控制无人机的运动。真机实飞时,则直接驱动飞机进行飞行。 |
| 参数 | 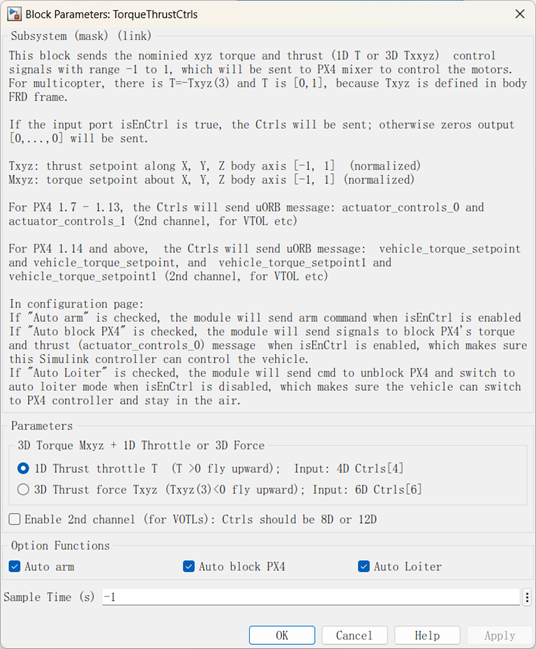 |
| 控制信号维度选择区域 | 自定义选择控制信号中力矩的维度 |
| Enable 2nd channel | 若勾选,则表示开启第2控制通道。 |
| 功能选择区域 | 若勾选Auto arm,当isEnCtrl端口输入为true时,模块将发送解锁指令。 |
| 若勾选Auto block PX4,则模块将发送信号屏蔽PX4的输出。当isEnCtrl接口输入为true时,将使用Simulink控制器控制载具。 |
| 若勾选Auto Loiter,模块将发送命令解除对PX4输出的屏蔽,并切换到自动Loiter模式,当isEnCtrl接口输入为false时切换到Loiter模式,从而确保载具可以切换到PX4控制器并保持在空中。 |
| Sample Time(s) | 采样时间 |
| 输入 | |
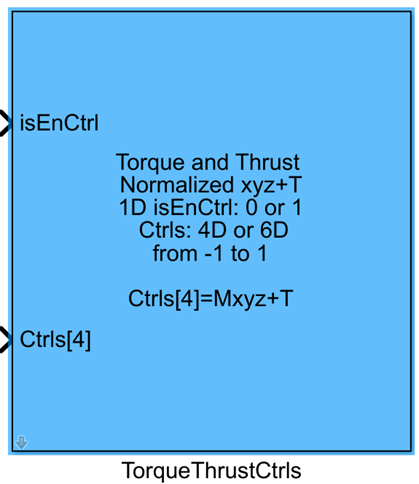
| isEnCtr | 若输入为true,则发送Ctrls控制量,反则发送[0,0,…0,0]。 |
| Ctrls[*] | 输入single数据类型的控制量 |
| 输出 | 输出的CtrlS[16]最终将被发送到CopterSim的DLL模型的inPWM接口中。 |
| 使用示例 | ../../5.RflySimFlyCtrl/0.ApiExps/17.OffboardCtrlsAPI/Readme.pdf |
Ctrls[*]具体协议如下:
第1控制通道:对于PX4版本为v1.7~v1.13版本,该模块将发送actuator_controls_0的uORB消息。对于PX4版本为v1.14版本,该模块将发送vehicle_torque_setpoint和vehicle_torque_setpoint的uORB消息。
方式一:Ctrls[4]
X:机体坐标系下绕X轴力矩
Y:机体坐标系下绕Y轴力矩
Z:机体坐标系下绕Z轴力矩
Thrust 1D:机体坐标系下沿Z轴推力,大于0表示向上飞行。
方式二:Ctrls[6]
X:机体坐标系下绕X轴力矩
Y:机体坐标系下绕Y轴力矩
Z:机体坐标系下绕Z轴力矩
Thrust 3D:机体坐标系下沿X、Y、Z轴推力,沿Z轴大于0表示向上飞行。
使能第2通道(针对于VOTLs):对于PX4版本为v1.7~v1.13版本,该模块将发送actuator_controls_1的uORB消息。对于PX4版本为v1.14版本,该模块将发送vehicle_torque_setpoint1和vehicle_torque_setpoint1的uORB消息。
方式一:Ctrls[8]
X:机体坐标系下绕X轴力矩
Y:机体坐标系下绕Y轴力矩
Z:机体坐标系下绕Z轴力矩
Thrust 1D:机体坐标系下沿Z轴推力,大于0表示向上飞行。
X1:机体坐标系下绕X1轴力矩
Y1:机体坐标系下绕Y1轴力矩
Z1:机体坐标系下绕Z1轴力矩
Thrust1 1D:机体坐标系下沿Z1轴推力,大于0表示向上飞行。
方式二:Ctrls[12]
X:机体坐标系下绕X轴力矩
Y:机体坐标系下绕Y轴力矩
Z:机体坐标系下绕Z轴力矩
Thrust 3D:机体坐标系下沿X、Y、Z轴推力,沿Z轴大于0表示向上飞行。
X1:机体坐标系下绕X1轴力矩
Y1:机体坐标系下绕Y1轴力矩
Z1:机体坐标系下绕Z1轴力矩
Thrust1 3D:机体坐标系下沿X1、Y1、Z1轴推力,沿Z1轴大于0表示向上飞行。