|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
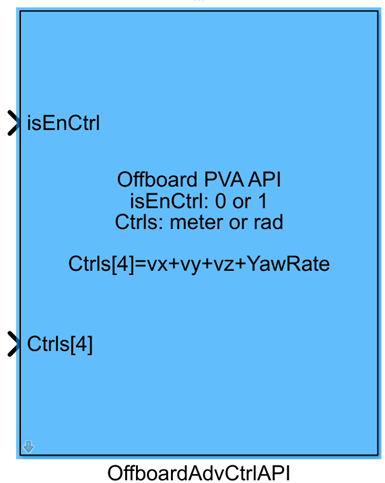
| 功能 | 可使能载具进入Offboard模式,通过发送的指令(可以是:x、y、z、vx、vy、vz、ax、ay、az、yaw、yawrate)控制载具在Offboard模式下运动。 |
|---|---|
| 参数 | 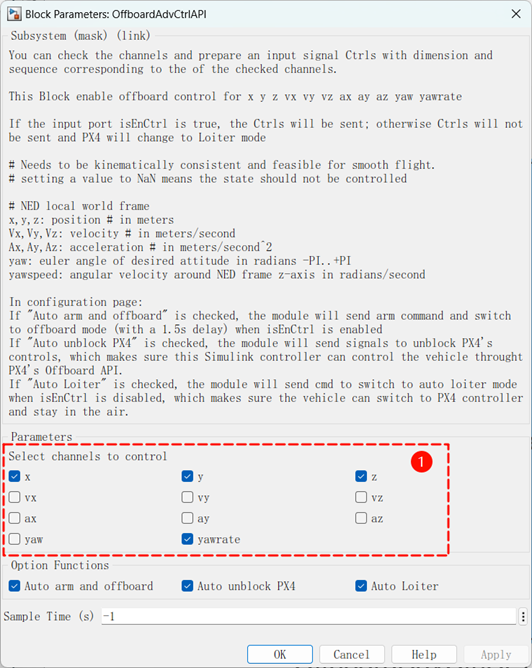 |
| 控制通道选择区域① | 控制通道选择区域可以根据个人需求自定义选择不同的Offboard模式的控制指令。 |
| 功能选择区域 | 若勾选Auto arm,当isEnCtrl端口输入为true时,模块将发送解锁指令。 |
| 若勾选Auto block PX4,则模块将发送信号屏蔽PX4的输出。当isEnCtrl接口输入为true时,将使用Simulink控制器控制载具。 | |
| 若勾选Auto Loiter,模块将发送命令解除对PX4输出的屏蔽,并切换到自动Loiter模式,当isEnCtrl接口输入为false时切换到Loiter模式,从而确保载具可以切换到PX4控制器并保持在空中。 | |
| Sample Time(s) | 采样时间 |
| 输入 | |
| isEnCtr | 当isEnCtrl端口输入为true时,则发送CtrlS[*]端口控制数据;否则不发送且PX4将进入Loiter模式。 |
| Ctrls[*] | 该模块输入*维归一化控制信号,用于Offboard模式的控制指令。 |
| 输出 | |
| 使用示例 | ../../5.RflySimFlyCtrl/0.ApiExps/17.OffboardCtrlsAPI/Readme.pdf |
Ctrls[*]具体协议如下: