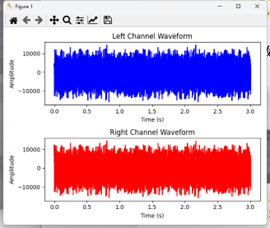
采集的左右声道音频
1. 功能概述
1.1 支持的功能操作
- 传感器输出 输出实时音频数据,用于环境音频采集与分析,可配置为开始或停止数据发送。
- 应用场景
- **环境音监测**:检测无人机飞行环境中的噪声强度和音频特征。
- **目标定位**:通过声音信号进行声源定位或特定目标检测(如人员求救声)。
- **音频采集**:用于多媒体任务,如同步视频的音频录制。
- **智能识别**:结合 AI,识别特定声音(如警报、语音命令)。
1.2 使用示例
配置文件添加传感器 以下是配置文件 Config.json 的示例代码,用于添加 RGB 图像传感器:
{
"VisionSensors":[
{
"SeqID":0,
"TypeID":6,//声音传感器
"TargetCopter":0,//无效
"TargetMountType":0,//无效
"DataWidth":0,//无效
"DataHeight":0,//无效
"DataCheckFreq":30,//发送频率
"SendProtocol":[0,127,0,0,1,28003,0,0],
"CameraFOV":0,//无效
"SensorPosXYZ":[0,0,0],//无效
"SensorAngEular":[0,0,0],//无效
"otherParams":[1,0,0,0,0,0,0,0]//otherParams[0]是1的时候开始发送音频数据,是0的时候停止发送音频数据
}
]
}
Python 调用传感器接口 以下代码用于接收音频数据:
#加载传感器配置文件 (Config.json) 并发送捕获请求。
vis.jsonLoad()
isSuss = vis.sendReqToUE4()
#缓冲区与参数配置
buffer_size = 204800 #定义接收数据的最大大小。
sample_rate = 48000 #音频采样率(48 kHz)。
channels = 2 #音频采样率(48 kHz)。
data_buffer = b""#存储音频数据
elapsed_time = 0 #累计接收音频的时间
例程链接
1.3 现实中的声音传感器
- 硬件示例
- MEMS 麦克风模块(如 ADMP401、MAX9814)。
- 高灵敏度环境音采集器(如 Zoom H1n 录音笔)。
- 声波定位传感器(用于水下声呐)。
2. 传感器配置
2.1 网络通信配置
| 参数名称 | 取值范围 | 含义 |
| SendProtocol | [mode, IP, port, …] | 配置数据传输协议,支持共享内存和 UDP。 |
| SendProtocol[0] | 0: 共享内存;1: UDP 压缩传输 | 选择传输方式。 |
| SendProtocol[5] | 端口号 | 数据传输的目标端口号。 |
2.2 传感器技术规格
| 技术参数 | 配置值 | 说明 |
| SeqID | 0 | 唯一传感器序号。 |
| TypeID | 6 | 传感器类型,声音传感器。 |
| DataCheckFreq | 30 Hz | 数据刷新频率,默认 30Hz,最大支持取决于RflySim3D刷新率。 |
| otherParams[0] | 1 | 是否发送音频数据,1为是,0为否 |