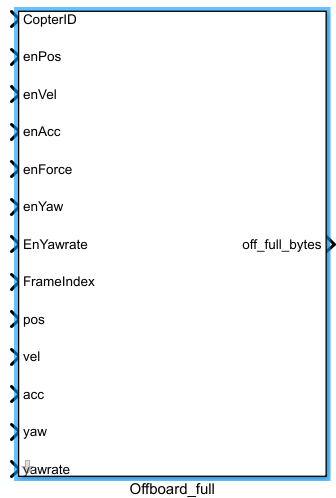
**输入端口**:
- CopterID:
- **类型**:整型(uint8)
- **描述**:无人机的唯一标识符,用于区分多台无人机。
- enPos、enVel、enAcc、enForce、enYaw、enYawrate:
- **类型**:布尔型(boolean)
- **描述**:分别用于启用位置、速度、加速度、力、航向角和航向角速度的控制模式,汇总为一维type_mask 。
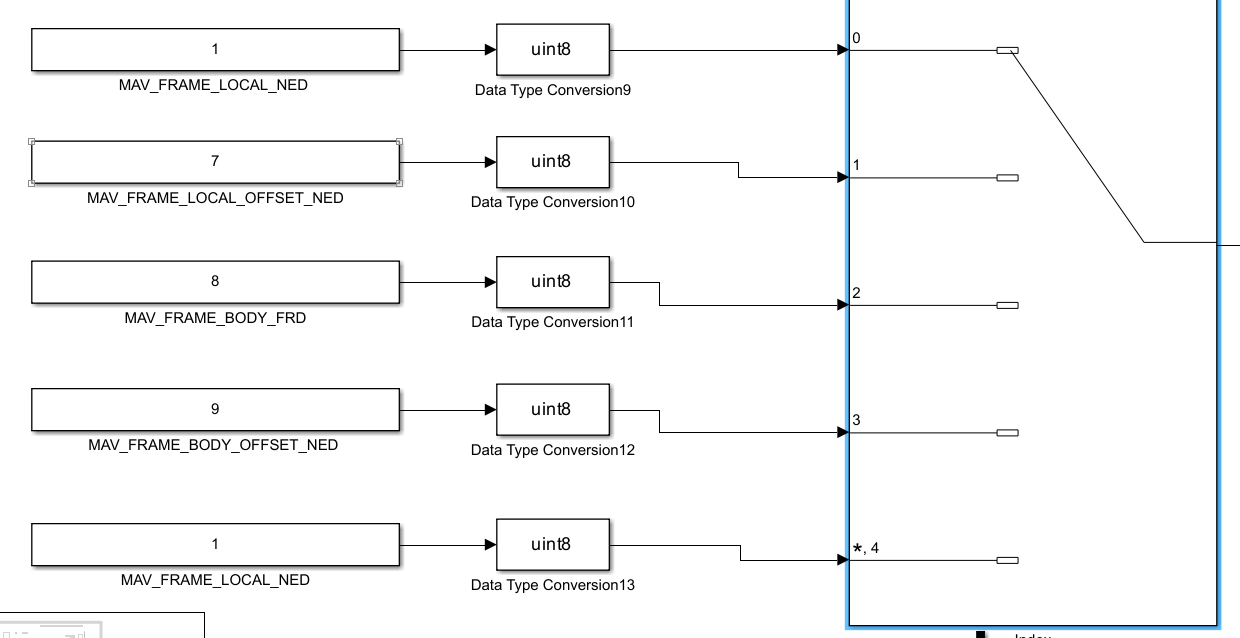
- FrameIndex:
- **类型**:整型(uint8)
- **描述**:坐标系索引,用于指定控制信号的参考坐标系,例如 MAV_FRAME_LOCAL_NED、MAV_FRAME_BODY_FRD,选择其一作为一维coordinate_frame。
- Pos、Vel、Acc、Force、Yaw、Yawrate:
- **类型**:均为3维浮点型(double)数组
- **描述**:控制量包括位置、速度、加速度、力、航向角和航向角速度
- type_mask 和 frame_index:
- **类型**:浮点型(double)
- **描述**:分别用于指定目标类型和帧索引。
**输出端口**:
- Offboard_bytes:
- **类型**:8维double型字节数组
- **描述**:生成的 MAVLink 消息,包含控制命令数据。
使用示例:[安装目录]\RflySimAPIs\10.RflySimSwarm\1.BasicExps\e1_RflyUdpSwarmExp\index.html