|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
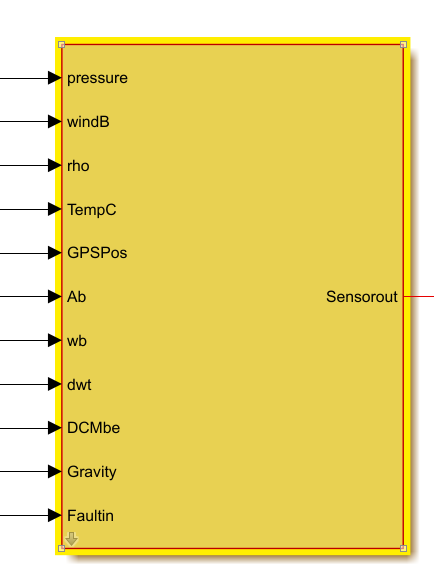
位于以下位置:MulticopterModel/OutputPort1/HILSensorMavModel1/Subsystem/SensorFault
| 功能 | |
|---|---|
| 输入 | |
| pressure | 大气压强 |
| windB | 速度,用三元素向量表示。 |
| rho | 空气密度,用标量显示 |
| TempC | 大气 |
| GPSPos | 定位 |
| Ab | 在固定物体轴上的实际加速度,用三元素矢量指定,以选定的单位表示。 |
| wb | 以物体固定轴表示的角速率,用三元素矢量表示,单位为弧度/秒。 |
| dwt | 固定物体轴的角加速度,用三元素矢量表示,单位为弧度/秒的平方。 |
| DCMbe | 方向余弦矩阵,用于将载荷移动引起的力转换到无人机坐标系中。 |
| Gravity | 重力 |
| FaultIn | 故障输入,包括故障类型和故障参数。 |
| 输出 | |
| Sensorout | 将无人机加速度、角速度、磁场与维度乘积、维度封装在bus总线中 |
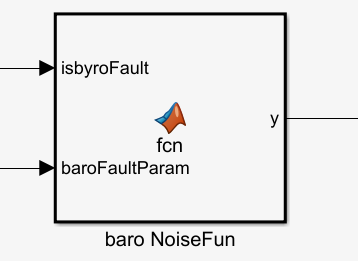
| 功能 | 根据是否存在气压计故障的标志来确定输出的值。 |
|---|---|
| 输入 | |
| isbyroFault | 指示是否存在气压计故障。如果为 true,表示存在气压计故障。 |
| baroFaultParam | 包含气压计故障参数的向量。在这个函数中,baroFaultParam 的第一个元素用于设置故障值。 |
| 输出 | |
| y | 函数的输出结果。默认情况下,y 被初始化为 0。如果 isbyroFault 为 true,则 y 会被设置为 baroFaultParam 的第一个元素。 |
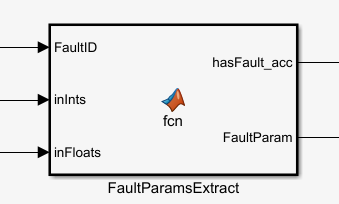
参考FaultParamsExtract.md