|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
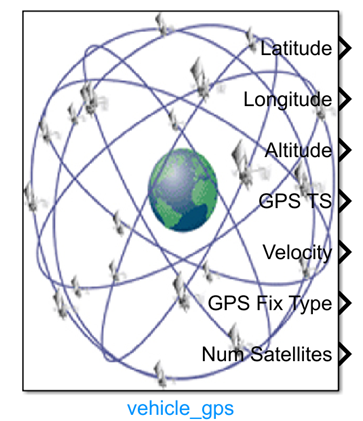
| 功能 | 通过这个模块可以获取Pixhawk的GPS数据,它是通过订阅uORB话题“vehicle_gps”实现的,所以在实际运行时需要保证Pixhawk上插入GPS模块才能获取正确数据。 |
|---|---|
| 参数 |
|
| Sample time(s) | 采样时间 |
| Output Selection区域 | 可选运动状态输出 |
| l Latitude:(int32) 全局坐标给出在1e-7度。 | |
| l Longitude:(int32) 全局坐标给出在1e-7度。 | |
| l Altitude:(int32)在MSL(平均海平面)以上1e-3米(毫米)。 | |
| l GPS TS:(double)时间戳(GPS格式的微秒),这是来自GPS模块的时间戳。 | |
| l Velocity:(single)GPS地面速度,单位为米/秒。 | |
| l GPS Fix Type:(uint8)0-1=NO fix,2=2D fix,3=3D fix。 | |
| l Num Satellites:(uint8)用于计算的卫星数量。 | |
| 输入 | |
| 输出 | 由Output Selection区域的端口配置决定 |
| 使用示例 | ../../5.RflySimFlyCtrl/0.ApiExps/2.PSPOfficialExps/Readme.pdf |
