|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
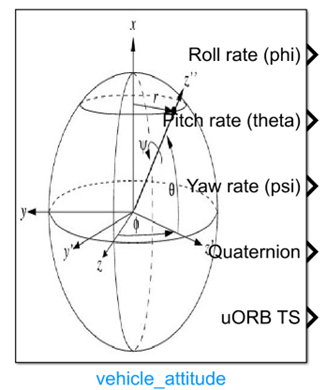
| 功能 | 该模块提供了经过滤波的姿态数据(欧拉角和四元数)并且提供对正在运行的服务的访问,该服务计算无人机的姿态。必须运行一个uORB主题(vehicle attitude(姿态测量))发布者,以便该块提供有效的信号值。为了使该块返回有效值,必须在px4fmu上运行其中一个。例如:px4fmu-v2 ekf2:用于姿态估计的ekf扩展卡尔曼滤波器;px4fmu-v2 default: SO(3)-利用加速度计、陀螺仪和磁力计进行姿态估计 |
|---|---|
| 参数 |
|
| Sample time(s) | 采样时间 |
| Output Signal Selection区域 | 可选姿态输出 |
| l Roll rate:(single)滚转率,单位为度/秒或者弧度/秒(NED)。 | |
| l Pitch rate: (single)俯仰率,单位为度/秒或者弧度/秒(NED)。 | |
| l Yaw rate: (single)偏航率,单位为度/秒或者弧度/秒(NED)。 | |
| l Quaternion(NED): (single)根据 uORB发布者可选(NED)。 | |
| l uORB Ts:用于实现高效的数据交换和时间同步。 | |
| 输入 | |
| 输出 | 由Output Signal Selection区域的端口配置决定 |
| 使用示例 | ../../5.RflySimFlyCtrl/0.ApiExps/2.PSPOfficialExps/Readme.pdf |
