|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
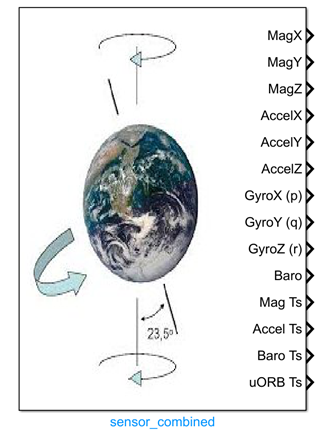
| 功能 | 通过这个模块可以获取Pixhawk中可用的传感器数据,然后这些数据可以用于控制模型的设计。可获取的数据包括磁力计、加速度计、陀螺仪、气压计和时间戳。sensor_combined块需要在PX4硬件上运行px4io服务,以便获得有效的信号值。 |
|---|---|
| 参数 |
|
| Sample time(s) | 采样时间 |
| Output Selection区域 | 可选数据包括磁力计、加速度计、陀螺仪、气压计和时间戳。 |
| l Magnetometer(x,y,z):(single)磁强计(x,y,z),NED下的磁场,高斯单位。 | |
| l Accelerometer(x,y,z): (single)加速度计(x,y,z),加速度在NED下的框架,单位m/s^2。 | |
| l Gyroscope(x,y,z): (single)陀螺仪(p,q,r),角速度单位弧度每秒。 | |
| l Barometer(Altitude): (single)气压计(海拔),已补偿温度的气压(毫巴)。 | |
| l uORB and RunTime(timestamp):(double)从陀螺仪启动以来以微秒为单位的时间戳。 | |
| 输入 | |
| 输出 | 由Output Selection区域的端口配置决定 |
| 使用示例 | ../../5.RflySimFlyCtrl/0.ApiExps/2.PSPOfficialExps/Readme.pdf |
