|
RflySimSDK
v4.11
RflySimSDK说明文档
|
载入中...
搜索中...
未找到
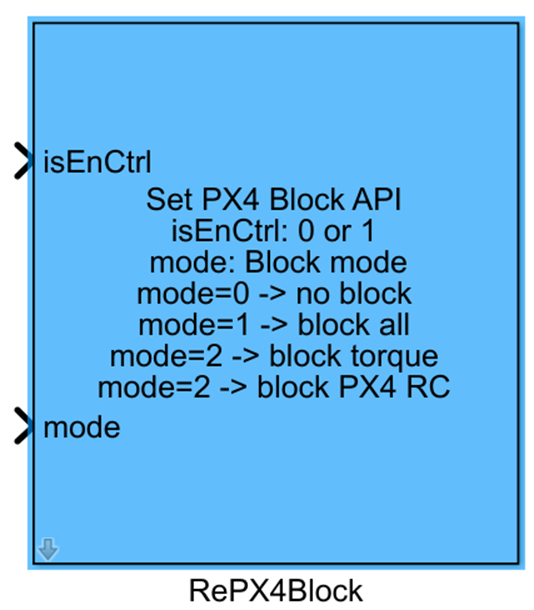
| 功能 | 本模块可实现在线屏蔽PX4输出的,该控制切换功能,是一键安装脚本在部署固件时,自动新增的接口。 |
|---|---|
| 参数 | 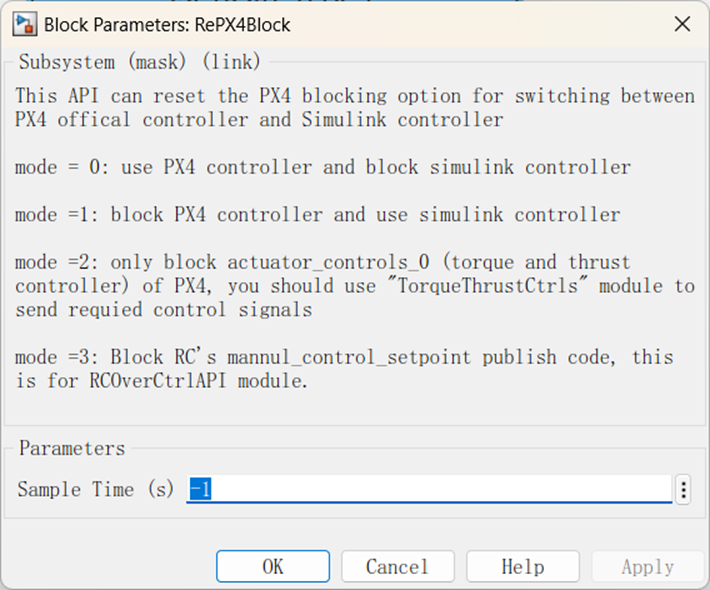 |
| Sample Time(s) | 采样时间 |
| 输入 | |
| isEnCtr | 当isEnCtrl端口输入为true时,则发送Mode中的数据进行自定义屏蔽输出,反则否 |
| mode | 可输入uint8类型数据实现不同的控制模式 |
| 输出 | 输出的CtrlS[16]最终将被发送到CopterSim的DLL模型的inPWM接口中。 |
| 使用示例 | ../../5.RflySimFlyCtrl/2.AdvExps/e0_AdvApiExps/5.RepPX4Func/Readme.pdf |
mode具体协议如下: