image-20240807174743482
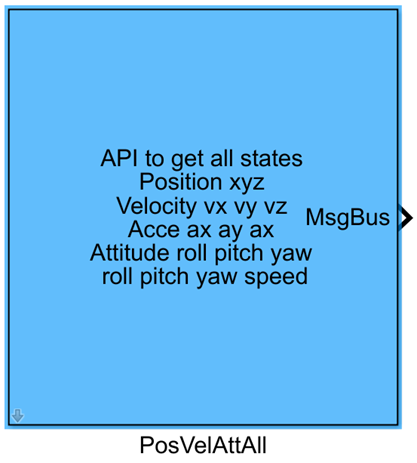
MsgBus具体协议如下:
\# Acceleration in NED frame
float32 ax # North velocity derivative in NED earth-fixed frame, (metres/sec^2)
float32 ay # East velocity derivative in NED earth-fixed frame, (metres/sec^2)
float32 az # Down velocity derivative in NED earth-fixed frame, (metres/sec^2)
uint64 timestamp # time since system start (microseconds)
float32[4] q # Quaternion rotation from the FRD body frame to the NED earth frame
float32 Roll # Roll in FRD coordinate system (obtained by quaternion conversion, unit: rad)
float32 Pitch # Pitch in FRD coordinate system (obtained by quaternion conversion, unit: rad)
float32 Yaw # Yaw in FRD coordinate system (obtained by quaternion conversion, unit: rad)
float32[3] xyz # Bias corrected angular velocity about the FRD body frame XYZ-axis in rad/s